




ВВЕДЕНИЕ
Идея осуществить замену человеку не нова: в 1495 году великий изобретатель Леонардо да Винчи спроектировал механического рыцаря, которого можно назвать первым антропоморфным роботом. С помощью системы тросов, рычагов, роликов находящийся внутри доспехов рыцаря механизм работал и мог имитировать человеческие движения [1]. Одно из первых использований роботов как замены функций или определенных видов деятельности человека было представлено Комиссией по атомной энергетике США в 1949 году – Master-slave Manipulators (MSM, Model-1) в виде автоматизированного манипулятора, предназначенного для осуществления работ с радиоактивными материалами. Данное устройство не относится к антропоморфным роботам (АР), но, тем не менее, было призвано к осуществлению функций, ранее выполнявшихся людьми. Антропоморфные роботы со временем могут занять особую нишу в медицине, выполняя сложную в физическом отношении, а также эмоционально однообразную работу. По мере внедрения искусственного интеллекта, АР будут усложняться, а их функции расширяться.МАТЕРИАЛЫ И МЕТОДЫ
Для обзора по антропоморфным роботам были изучены зарубежные и российские научные публикации. Необходимо отметить, что российский сегмент научных публикаций по ключевым словам «антропоморфные роботы», «гуманоидные роботы», «социальные роботы» крайне мал и не отражает имеющийся на данный момент мировой практики. По ключевым словам «медицинские роботы», «роботы в медицине» публикаций больше, но в основном они содержат информацию о хирургических роботизированных системах в различных областях медицины.
Для данного обзора отобрано 20 публикаций из зарубежных научных источников. Разработаны 2 собственные классификации – медицинских роботов и антропоморфных медицинских роботов.
РЕЗУЛЬТАТЫ
В последние годы наблюдается взрывной рост развития робототехники. Наряду с промышленными, военными, сервисными роботами своим путем идет развитие медицинских роботов. По итогам суммирования имеющихся на данный момент видов медицинских роботов, нами предложена классификация медицинских роботов (рис. 1).
Антропоморфный робот – робот, способный воспроизводить некоторые характеристики человека, имитируя такие отличительные черты, как внешний вид и движения.
Универсальный антропоморфный робот – это сложная совокупность опорно-двигательного аппарата, механических конечностей, системы распознавания голоса, пространства и нейросетей, способных обрабатывать и понимать окружающую обстановку и голосовые команды. Отличительный признак АР: отсутствие когнитивных способностей и физической автономии.
В основе создания антропоморфных роботов лежат антропоморфные технологии (АТ) – это технологии, которые «копируют» человека и мотивируют антропоморфизм, то есть приписывание человекоподобных характеристик нечеловеческим объектам.
Классификация антропоморфных медицинских роботов (АМР) по внешней конструкции
- Механические роботы – в общих чертах воспроизводят отдельные черты человека.
- Гуманоидные роботы – роботы, по форме напоминающие человеческое тело. Как правило, роботы-гуманоиды имеют туловище, голову, две руки и две ноги, хотя некоторые роботы-гуманоиды могут копировать только часть тела.
- Андроиды (Geminoid DK) – гуманоидные роботы, созданные так, чтобы эстетически максимально напоминать людей.
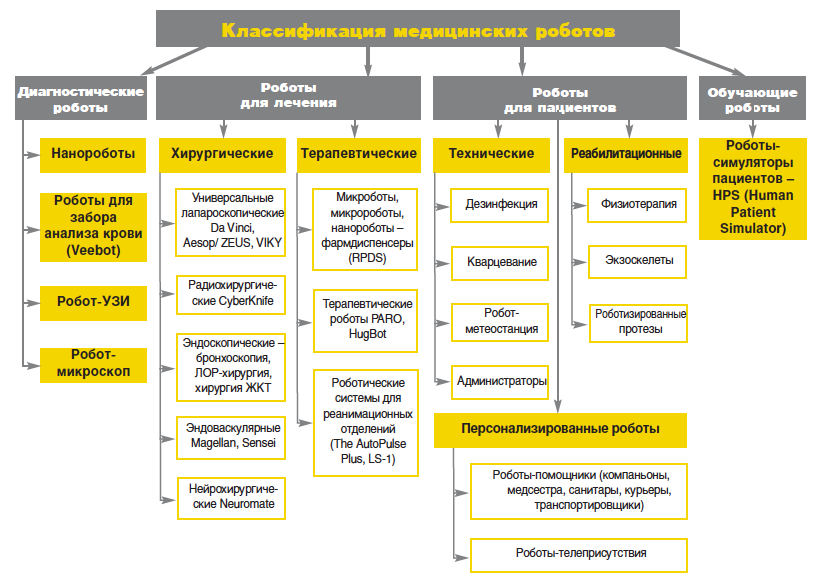
Рис. 1. Классификация медицинских роботов, предложенная авторами статьи, 2023 год
Fig. 1. Classification of medical robots proposed by the authors of the article, 2023
Антропоморфные роботы со временем могут занять особую нишу в медицине. По данным ReportsnReports, в 2022 году рынок роботов-гуманоидов оценивался в 1,5 млрд долларов США и, по оценкам, достигнет 17,3 млрд долларов США к 2027 году, что означает среднегодовой темп роста в 63,5% в период с 2022 по 2027 годы. Такая динамика рынка объясняется растущим развитием роботов-гуманоидов с расширенными функциями, все более широкое использование роботов-гуманоидов в образовательных целях, розничной торговле, для личной помощи и растущий спрос на роботов-гуманоидов в медицинском секторе. Однако высокие первоначальные затраты и расходы на исследования и разработки, необходимые для разработки передовой робототехники, сдерживают рост рынка. Аналитики считают, что наибольшим спросом антропоморфные (гуманоидные) роботы в медицине будут пользоваться для ухода за пожилыми пациентами в Азиатско-Тихоокеанском регионе, в т. ч. Китай, Япония. Это объясняется ростом пожилого населения в этих странах [2].
Основные иностранные компании, работающие на рынке роботов-гуманоидов:
- SoftBank Robotics (Япония);
- ROBOTIS (Южная Корея);
- KAWADA ROBOTICS CORPORATION (Япония);
- Honda Motor Co., Ltd. (Япония);
- UBTECH. Robotics Corp. Ltd. (Китай);
- HANSON ROBOTICS Ltd. (Гонконг);
- PAL Robotics (Испания);
- TOYOTA MOTOR CORPORATION (Япония) и другие.
В 2021 году в России насчитывалось более 70 организаций, производящих гуманоидных роботов. В 2019 году РФ заняла второе место (после США) в рейтинге IFR. Наиболее успешные из них:
- Promobot — крупнейший производитель сервисных роботов в Европе;
- Alex Robotics;
- «Нейроботикс» (робот «Пушкин»);
- НПО «Андроидная техника» (FEDOR).
Уже сейчас антропоморфные роботы постепенно внедряются в медицинскую практику, выполняя серьезные и ответственные задачи. Учитывая, что гуманоидная робототехника находится в стадии активного развития, роботы не лишены недостатков, которые могут быть устранены в ходе последующих версий роботов.
Гериатрия
В обзоре Andtfolk M. и соавт. описано применение антропоморфных роботов для медицинского ухода за пожилыми пациентами. Проведенный авторами обзор позволил выделить четыре направления применения человекоподобных роботов в уходе за пожилыми пациентами:
- поддержка в обычной жизни;
- помощь во взаимодействии;
- помощь с проведением когнитивных тренировок;
- помощь с проведением физических тренировок.
Человекоподобные роботы могут выступать компаньонами для пожилых людей, однако существуют такие ограничения, как, например, медленный ответ роботов (ответ с задержкой) и различные ошибки. Кроме того, исследователи отметили снижение удовлетворенности пожилых пациентов работой роботов при их длительном использовании [3].
Во многих странах наблюдается тенденция к старению населения: снижение рождаемости, уменьшение количества детей и увеличение количества продолжительности жизни, а следовательно, рост числа пожилых граждан. Такие демографические изменения ведут к необходимости формирования качественной системы ухода за пожилыми пациентами. Роботические технологии уже сейчас являются одним из оптимальных решений, внедряемых в систему социального и медицинского ухода. Для создания качественного взаимодействия человек-робот необходимо наличие у робота компетенций в области ухода за больными. Исследовательская группа Таниока в настоящее время проводит клиническое исследование применения антропоморфных роботов, оснащенных программой Pepper (SOFTBANK CORPORATION), в реабилитации и уходе за пожилыми. Общие результаты поведенческих изменений, актиграфии, вариабельности сердечного ритма у пациентов с деменцией показали положительную корреляцию между симпатической активностью и измерением активности с помощью актиграфии в бодрствующем состоянии при выполнении пациентами упражнений, показываемых роботом. Исследователи считают, что программа робота, проводящего упражнения для реабилитации, способны активировать активность автономной нервной системы пожилых пациентов, и, таким образом, улучшить качество их жизни (рис.2) [4].

Рис. 2. Теория трансактивных отношений в сестринском деле (TRETON) объясняет, что происходит между роботом и человеком
Fig. 2. The Transactive Relationship Theory of Nursing (TRETON) explains what transpires between the robot and the human being
Еще одно исследование, посвященное применению гуманоидных социальных роботов (social assistive robots – SARs) у пациентов с деменцией, было проведено J. Zuschnegg с целью изучения положительных и негативных ожиданий медицинского персонала, тренеров и сиделок в отношении качества и спектра работы, выполняемой роботом. Всего было изучение мнение 11 фокусных групп перечисленных выше социальных работников, которые работали в домах престарелых, центрах ухода или обеспечивали уход за пациентами с деменцией дома. Всего приняли участие 52 сотрудника. В основном, участники сообщили об ожидании от роботов SARs поддержки в отношении некоторых человеческих потребностей – избежание опасности (распознавание опасности, вызов помощи), общение и контакт с другими людьми (включение телефонных звонков), ежедневные дела (напоминания о медицинских назначениях, выполнении домашних обязанностей), развлечения (включение музыки), помощь в приготовлении еды/питья, влияние на мобильность человека (напоминание о смене положения тела, инструкции к физическим упражнений). Негативные ожидания, в основном, были связаны с потерей межличностного взаимодействия и скептицизм в отношении чрезвычайных ситуаций. Вероятно, признание роботов SARs полезными в отдельных компонентах ухода, делают их в будущем довольно привлекательными для оказания социальной и медицинской помощи пациентам с деменцией [5].
Педиатрия
Обзор применения антропоморфных роботов для ухода за детьми с расстройством аутистического спектра (РАС). В статье Puglisi A. приводится термин робот-ассистированная терапия – терапия с помощью робота, которая видится перспективной областью нейробиологии для пациентов с РАС. Робот в данном случае выступает посредником между медицинским/социальным работником и ребенком-пациентом обеспечивая так называемое триадное взаимодействие. На данный момент есть несколько типов таких роботов, но нет никаких исследований, сравнивающих их между собой [6].
В приведенных выше поведенческих исследованиях было обнаружено, что дети с РАС проявляют больше интереса к человекоподобным роботам, чем к людям. Однако нейронный механизм, лежащий в основе данного феномена, не до конца изучен.
В исследовании Hou S. ученые сравнили активность головного мозга и паттерны его активации у детей с РАС и нейротипичных (здоровых) детей во время просмотра видео, показывающих роботов и людей. В работе приняли участие 45 детей с РАС и 53 здоровых ребенка в возрасте 4–6 лет. Оценка нейронной активности дорсолатеральной префронтальной коры (ДСПФК) проводилась с помощью спектроскопии в ближней инфракрасной области (БИК-спектроскопии) у обеих групп во время просмотра видео роботов и людей. У детей с РАС нейронная активность правой ДСПФК была значительно ниже при просмотре видео с роботами, чем при просмотре видео с людьми. При этом у детей с РАС нейронная активность правой ДСПФК также была значительно ниже, чем у здоровых детей. Нейронная активность левой ДСПФК детей с РАС негативно коррелировала между людьми и роботами, в то время как у здоровых детей корреляция была положительной. Таким образом, здоровые дети показали одинаковую нейронную активность при наблюдении за антропоморфными роботами и людьми, в то время как у детей с РАС нейронная активность значительно отличалась. Детям с РАС требуется больший объем селективного внимания для взаимодействия с людьми, чем с роботами. Нейронная активность левой ДСПФК у детей с РАС коррелировала с их симптомами, что может стать индикатором для ранней диагностики РАС. Нейронная активность левого ДСПФК была причиной атипичной реакции и взаимодействия с роботами. Ученые сделали вывод об атипичном ответе префронтальной коры детей с расстройством аутистического спектра (РАС) на антропоморфных роботов [7].
Одной из когнитивных функций, нарушающихся у детей с РАС, является совместное внимание (joint attention). Совместное внимание – это феномен направления внимания (в частности взгляда) в ту же сторону и на те же объекты или события, что и человек рядом (собеседник). В статье Chevalier P. и соавт. было рассмотрено применение антропоморфных роботов для изучения данной когнитивной функции. Совместное внимание может быть оценено как с помощью очного взаимодействия робот-человек, так и в ходе наблюдения исследуемым за роботом, записанным на видео. Эта методика формирует новые инструменты, которые могут быть использованы в диагностике и терапии детей с РАС [8].
Некоторые исследования показали, что наличие человекоподобных черт у роботов может привести к тому, что взрослые и дети будут относиться к ним как к людям, то есть антропоморфизировать их.
В исследовании Manzi F. авторы сравнили психологическое отношение детей к двум видам роботов – NAO и Robovie, имеющим разные степени схожести с человеком. В исследовании детям в возрасте 5, 7 и 9 лет было необходимо выразить свое отношение к роботам, при этом Robovie имел больше механических черт, а NAO был более человекоподобным. Результаты показали, что дети в возрасте 5 лет имели более выраженную тенденцию к антропоморфизации роботов вне зависимости от их внешнего вида. Дети 7 и 9 лет также приписывают обоим видам роботов человеческие черты, однако более развитым психическим состоянием наделяют NAO, а не Robovie. Данное исследование показало, что дети имеют тенденцию к «очеловечиванию» антропоморфных роботов, во внешнем виде которых преобладают механические черты. Тем не менее, более близкий к человеческому вид робота повышает восприятие его детьми как человекоподобного. Авторы считают, что на основании данного исследования и аналогичных по дизайну возможно правильное сопоставление роботов и целевой аудитории для их применения (рис. 3) [9].
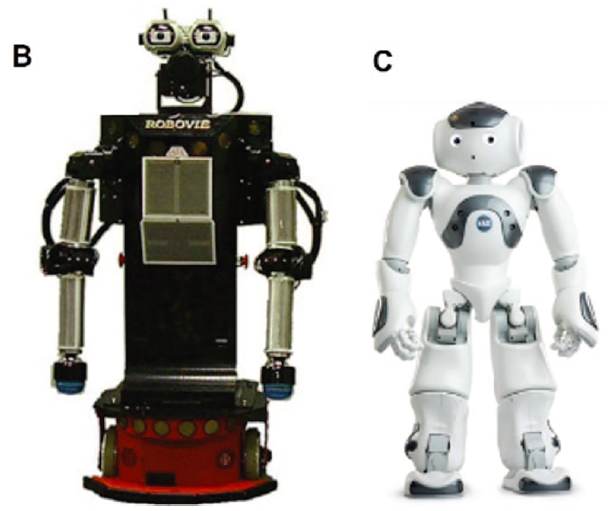
Рис. 3. (В) – Robovie; (C) – NAO
Fig. 3. (В) – Robovie; (C) – NAO
Социальные аспекты антропоморфных роботов
Взаимодействие людей и роботов, влияние последних на активность человеческого мозга и выявление закономерностей или параметров коллаборации стало предметом изучения нейробиологов. Способы выражения эмоций людьми в отношении роботов изучаются через сопоставление вербальных и невербальных коммуникативных проявлений.
Во время межличностных взаимодействий многие жесты могут быть использованы с разными эмоциями, выражая таким образом положительное или отрицательное отношение к собеседнику. Например, пожатие руки может быть мягким или энергичным. Ключевой областью, отвечающей за формирование реакций на подобные взаимодействия человек-человек, считается дорсо-центральная островковая доля головного мозга. В работе Di Cesare G. ученые провели две функциональных магнитно-резонасных томографии (фМРТ) для исследования реакции людей на взаимодействие с человекоподобным роботом iCub. Робот мог взаимодействовать с высокой и низкой скоростью, копировать вежливое и грубое поведение. Наблюдение участников за медленными и быстрыми действиями робота приводили к активации теменно-лобного контура, который в норме отвечает за распознавание и выполнение действий, однако дорсо-центральная островковая доля задействована не была. Воспроизведение роботом вежливых и грубых действий привело к повышению местного потребления кислорода в дорсо-центральной островковой доле. Таким образом, роль дорсо-центральной островковой доли селективна по отношению к реакции на действия человекоподобных роботов [10].
Не меньший интерес вызывает изучение отношения медицинских работников к применению человекоподобных роботов для ухода за пациентами. Результаты социальной работы Papadopoulos I. показали, что медицинские работники формируют свое отношение к роботу на основании спектра действий и манипуляций, которые они способны выполнять, а также на основании безопасности пациентов и их личных данных, с которыми работают роботы. То есть, отношение медицинского персонала и работников социальных служб к применению роботов формируется на основании влияния роботов на состояние пациентов [11].
В серии экспериментов было изучено влияние трех уровней вежливости неантропоморфных роботов на удовлетворенность человека от взаимодействия с ним. Исследователи поставили задачу сервировки стола роботом-манипулятором и мобильным роботом, условия взаимодействия – видеозапись и «вживую». Участники исследования делились на 2 группы – молодых и пожилых. Результаты показали, что вежливое поведение робота позитивно влияло на восприятие участниками их взаимодействия, а также участники могли дифференцировать различные уровни вежливости, составленные для каждой ступени исследования. Самый высокий уровень удовольствия у участников встречался при самом высоком уровне вежливости робота. Однако более молодые совершеннолетние участники исследования меньше доверяли вежливости роботов, чем остальные взрослые. Доверие от взаимодействия с роботом были выше, если общение происходило в очных условиях, и больше симпатии выказывалось мобильному роботу, чем роботу-манипулятору [12].
Другие исследователи сделали попытку разработать методологию изучения взаимодействия робота и человека на примере использования робота-преподавателя. Они изучали 3 эффекта: приобретение знаний учащимися (тест после лекции и итоговые оценки за экзамен), уровень удовольствия (опросник по шкале Лайкерта) и уровень удивления (анализ выражений лиц, снятых камерами). Чтобы определить взаимосвязь между приобретением знаний учащимися, удовольствием и уровнем удивления, ученые разработали серию из трех экспериментов, проверяя три переменные: 1. Один урок с человеком-наставником; 2. Один урок с роботом-наставником; 3. Два робота-наставника. Уроки репетитора [13].
Психиатры изучают возможности робототерапии, эффект от которой оценивается на уровне анималотерапии: роботы не только развлекают, но и оказывают помощь, обучают, обеспечивают общение, стимулируют разум. Благодаря этому робототерапия может считаться новым методом психиатрической помощи пожилым людям [14].
Антропоморфные роботы уже продемонстрировали свою эффективность в медицине, однако для дальнейшего внедрения в клиническую практику необходимо более тщательное изучение и понимание факторов, влияющих на ощущение безопасности людей во время взаимодействия с роботами. Обеспечение чувства безопасности пациентов – это ключевой принцип качественного медицинского ухода.
В исследовании Nyholm L. и коллег было проведено 12 полуструктурированных интервью, в которых приняли участие 5 женщин и 7 мужчин в возрасте 24–77 лет. Перед проведением интервью участникам было показано видео с Pepper – роботом, применяемым в ежедневном медицинском уходе за пациентами. Материалы интервью были проанализированы с помощью качественного контекстного анализа. Большая часть участников описали использование человекоподобных роботов в медицине как позитивное и негативное одновременно. Основополагающей темой стала амбивалентность чувства безопасности при взаимодействии с роботами в медицине. Было выделено 4 категории:
- антропоморфные роботы заслуживают и не заслуживают доверия;
- антропоморфные роботы безопасны и небезопасны;
- они одновременно нравятся и пугают;
- человекоподобные роботы могут и не могут заботиться в достаточном объеме.
Данное исследование показало наличие двойственного отношения к роботам у пациентов, и чувство страха и отсутствия безопасности должно быть принято во внимание при разработке и внедрения человекоподобных роботом в клиническую практику [15].
Роботы с открытым программным обеспечением могут использоваться как платформа для исследований в области эмоциональных коммуникаций, в том числе с использованием искусственного интеллекта, что открывает возможности создания антропоморфных роботов с эмоциональным интеллектом. Уже разработан робот с головой, которая может воспроизводить человеческие эмоции, движения головы и речь благодаря наличию 25 мышц, включая 12 лицевых мышц, способных осуществлять максимальное движение кожи до 15 мм [16].
Особенности взаимодействия робота с людьми в ряде случаев формируют потребность в создании роботов, имеющих собственную «личность». Применение искусственного интеллекта позволяет реализовать данную потребность и сформировать «личность» робота, выражающуюся во время невербального общения, например, с помощью изменения выражения «лица» робота. Такая разработка позволяет, например, воспринимать идентичных внешне роботов как личностей с различными характерами. Результаты исследования показали, что люди способны дифференцировать от четырех до восьми моделей поведения при разговоре с роботом [17].
Sacino A. и соавт. в серии трех экспериментов исследовали особенности восприятия роботов людьми: воспринимают ли люди роботов как человекоподобных или как неживые предметы? Авторы сравнивали реакцию участников исследования на изображения роботов и людей, появляющиеся на экране. Данные фотографии могли быть как в обычном положении, так и перевернутые на 180 градусов, с расчетом индекса инвертированности. Данный индекс позволяет более независимо оценить распознавание каких-либо объектов как человекоподобных. Результаты показали, что изображения роботов в полный рост воспринимались участниками так же, как и изображения людей вне зависимости от степени антропоморфности данных роботов. Однако результат третьего эксперимента показал, что, в отличие от распознавания роботов в полный рост, индекс инвертированности при просмотре лиц роботов отличался в зависимости от степени их антропоморфизации: чем более похож был робот на человека внешне, тем выше был индекс инвертированности. Таким образом, авторы данного исследования выяснили, что более антропоморфные роботы когнитивно распознаются воспринимаются людьми как живые люди, в отличие от роботов с низкой внешней схожестью с человеком [18].
По мере того, как природа отношений человека и робота все больше смещается от супервизора-машины к другу-компаньону, люди проявляют все больший интерес к вынесению социальных суждений о таких антропоморфных объектах, как надежность. Однако черты лица социальных роботов и их потенциальное влияние на антропоморфную достоверность редко анализируются. В этом исследовании изучалось, имеет ли восприятие доверия к социальному роботу сходство с детскими чертами на человеческом лице. Он также исследовал влияние различных комбинаций детских черт лица, особенно положения и размеров глаз и рта, на достоверность антропоморфного лица. Соответственно был проведен 5-сторонний смешанный эксперимент с 270 участниками. Результаты показали, что люди будут испытывать высокий уровень антропоморфной достоверности лица по отношению к роботам с чертами детского лица (т. е. большие глаза, со средним вертикальным и горизонтальным положением глаз и рта). Эта статья дополняет литературу по достоверности антропоморфных черт лица при взаимодействии человека и робота и содержит предложения по проектированию социальных роботов [19].
Антропоморфный внешний вид является ключевым фактором, влияющим на отношение и эмоции пользователей. Учеными было проведено исследование на измерение эмоционального опыта, вызванного антропоморфной внешностью роботов, с тремя уровнями – высоким, средним и низким. Физиологические данные и данные айтрекера 50 участников записывались синхронно, пока они наблюдали за изображениями роботов, которые отображались в случайном порядке. После этого участники сообщили о субъективных эмоциональных переживаниях и отношении к этим роботам. Результаты показали, что изображения умеренно антропоморфных роботов вызывали более высокие оценки удовольствия и возбуждения, а также значительно больший диаметр зрачка, чем низкие или высокие роботы. Электромиография лица участников, проводимость кожи и частота сердечных сокращений были выше при наблюдении за умеренно антропоморфными роботами. Смысл исследования заключается в том, что внешний вид гуманоидных роботов должен быть умеренно антропоморфным; слишком много человекоподобных или машиноподобных функций могут мешать положительным эмоциям и отношениям пользователей. Результаты показали, что среднеантропоморфные роботы вызывают больше положительных эмоций, чем высоко- и низкоантропоморфные роботы. Слишком много или слишком мало человеческих или машинных функций могут испортить положительные эмоции пользователей [20].
ОБСУЖДЕНИЕ
В настоящее время создание антропоморфных роботов и их внедрение в медицинскую практику идет фактически параллельно. Технические сложности в виде устойчивости шагающих машин, физической силы и безопасности в отношении пациентов роботов, отсутствия единой методологии, математического и программного обеспечения для проектирования АР, запас прочности, – все это решается очень быстрыми темпами.
Спектр применения антропоморфных роботов в медицине представлен на рис. 4.

Рис. 4. Классификация антропоморфных медицинских роботов по областям выполняемых функций, предложенная авторами статьи, 2023 год
Fig. 4. Classification of anthropomorphic medical robots by areas of performed functions, proposed by the authors of the article, 2023
Применение АР в медицине дает новые научные данные, особенно в психиатрии, гериатрии, педиатрии, социологии. Наибольшее внимание привлекают психологические аспекты человеко-машинного взаимодействия – аудиовизуальный интерфейс, сценарии поведения. Несомненно, применение АР в медицине существенно облегчит уход за пациентами, людьми пожилого и старческого возрастов, психиатрическими пациентами.
ВЫВОДЫ
- В последние годы наблюдается взрывной рост развития робототехники. Наряду с промышленными, военными, сервисными роботами, своим путем идет развитие медицинских роботов.
- Наибольшим спросом антропоморфные (гуманоидные) роботы в медицине будут пользоваться для ухода за пожилыми и за пациентами с ограничением двигательных функций, во время пандемий или других потенциально опасных для жизни человека ситуациях.
- В будущем на этапе внедрения искусственного интеллекта требуется тщательная проработка законодательства и системы безопасности таких роботов.
- В настоящее время стоимость АР достаточно высока, однако в перспективе снижение стоимости будет сопряжено с отсутствием затрат на изменение среды использования таких роботов, что, возможно, будет экономически оправданным.
- Важнейшим аспектом применения АР является эмоциональное взаимодействие с человеком и безопасность последнего.
ЛИТЕРАТУРА
1. Yates DR, Vaessen C, Roupret M. From Leonardo to da Vinci: the history of robot-assisted surgery in urology. BJU Int 2011;108(11):1708-1713.
2. Humanoid Robot Market by Component (Hardware (Sensors, Actuator, Power Source, Control System/Controller), Software), Motion Type (Biped, Wheel Drive), Application and Geography (North America, APAC, Europe, RoW) - Global Forecast to 2027. [Electronic resource]. URL: https://www.reportsnreports.com/reports/1222387-humanoid-robot-market-by-component-motion-type-biped-wheel-drive-application-education-and-entertainment-research-space-exploration-personal-assistance-and-caregiving-search-and-rescue-public-relations-st-to-2023.html
3. Andtfolk M, et al. Humanoid robots in the care of older persons: A scoping review. Assistive Technology 2022;34(5):518-526.
4. Tanioka T. Nursing and Rehabilitative Care of the Elderly Using Humanoid Robots. J Med Invest 2019;66(1.2):19-23.
5. Zuschnegg J, et al. Humanoid socially assistive robots in dementia care: a qualitative study about expectations of caregivers and dementia trainers. Aging & Mental Health 2022;26(6):1270-1280.
6. Puglisi A, et al. Social Humanoid Robots for Children with Autism Spectrum Disorders: A Review of Modalities, Indications, and Pitfalls. Children 2022;9(7):953.
7. Hou S. et al. Young children with autism show atypical prefrontal cortical responses to humanoid robots: An fNIRS study. International Journal of Psychophysiology 2022;181:23-32.
8. Chevalier P, et al. Examining joint attention with the use of humanoid robots-A new approach to study fundamental mechanisms of social cognition. Psychon Bull Rev 2020;27(2):217-236.
9. Manzi F, et al. A Robot Is Not Worth Another: Exploring Children,s Mental State Attribution to Different Humanoid Robots. Front Psychol 2020;11:2011.
10. Di Cesare G, et al. How attitudes generated by humanoid robots shape human brain activity. Sci Rep 2020;10(1):16928.
11. Papadopoulos I, Koulouglioti C, Ali S. Views of nurses and other health and social care workers on the use of assistive humanoid and animal-like robots in health and social care: a scoping review. Contemporary Nurse 2018;54(4–5):425-442.
12. Kumar S, et al. Politeness in Human-Robot Interaction: A Multi-Experiment Study with Non-Humanoid Robots. Int J of Soc Robotics 2022;14(8):1805-1820.
13. Velentza AM, Fachantidis N, Lefkos I. Human-robot interaction methodology: Robot teaching activity. MethodsX 2022;9:101866. https://doi.org/10.1016/j.mex.2022.101866.
14. Shibata T, Wada K. Robot therapy: a new approach for mental healthcare of the elderly - a mini-review. Gerontology 2011;57(4):378-86. https://doi.org/10.1159/000319015.
15. Nyholm L, Santamäki-Fischer R, Fagerström L. Users’ ambivalent sense of security with humanoid robots in healthcare. Informatics for Health and Social Care 2021;46(2):218-226.
16. Faraj Z, et al. Facially expressive humanoid robotic face. HardwareX 2021;9:e00117.
17. Luo L, et al. Towards a Personality AI for Robots: Potential Colony Capacity of a Goal-Shaped Generative Personality Model When Used for Expressing Personalities via Non-Verbal Behaviour of Humanoid Robots. Front Robot AI 2022;9:728776.
18. Sacino A, et al. Human- or object-like? Cognitive anthropomorphism of humanoid robots. PLoS ONE / ed Bongard J 2022;17(7):e0270787.
19. Song Y, Luximon A, Luximon Y. The effect of facial features on facial anthropomorphic trustworthiness in social robots. Appl Ergon 2021;94:103420. https://doi.org/10.1016/ j.apergo.2021.103420.
20. Zhang Y, Cao Y, Proctor RW, Liu Y. Emotional experiences of service robots' anthropomorphic appearance: a multimodal measurement method. Ergonomics 2023;1-19. https://doi.org/ 10.1080/00140139.2023.2182751.
