

 18
18
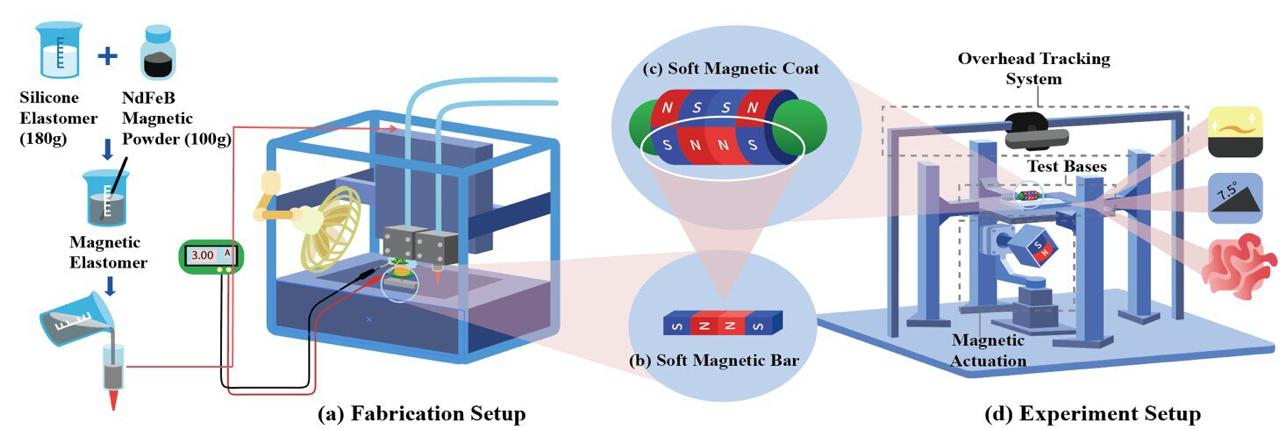
В UT Austin (лаборатория MINIMAX) показали прототип капсулы-робота, которую можно проглотить и управлять её движением в ЖКТ внешним магнитным полем. Идея — снизить зависимость от инвазивной эндоскопии и открыть путь к более точным вмешательствам.
🔬 В чём фишка конструкции
🔜Вместо «грубой» внутренней магнитной вставки — мягкая магнитная оболочка: частицы NdFeB смешали с силиконовой матрицей и 3D-печатали, одновременно программируя намагниченность.
🔜Получили оптимальный рисунок полюсов NSSN/SNNS, благодаря которому капсула самоориентируется в вращающемся внешнем поле и движется предсказуемо.
🧭 Что умеет
🔜Стабильно катится и рулит (roll/yaw): двунаправленное «качение», плавные повороты, устойчивость на наклонах и на «сложных» поверхностях.
🔜Тестировали движение на гладких/наклонных, сухих/влажных, текстурированных поверхностях — как приближение к условиям желудка.
📦 Почему представляет интерес
✅ Отказ от громоздкого внутреннего магнита освобождает весь объём капсулы под полезную нагрузку: камера, сенсоры, резервуар для локальной доставки лекарства, инструменты для локальной биопсии и т.п.
🧠 Отдельная интересная деталь (про безопасность)
В параллельной работе команда описывает подход к навигации с sensor fusion (IMU + изображения, имитирующие X-ray) и фильтром Калмана, что позволило снизить требуемую частоту кадров примерно в 10 раз — потенциально это означает меньшую лучевую нагрузку при навигации.
🚀 Что дальше
Перед клиникой — биосовместимость и безопасность, доработка магнитной навигации, миниатюризация электроники, беспроводная зарядка и тесты на фантомах/животных.
Источник: ICT&health (24 февраля 2026)
Новость подготовлена командой jTeleMed
