




ВВЕДЕНИЕ
Ультразвуковое исследование (УЗИ) является одним из самых распространенным методов диагностики, поскольку данное исследование неинвазивное и простое в исполнении. Однако несмотря на описанные преимущества, для выполнения УЗИ требуется врач со специализацией по ультразвуковой диагностике. При проведении исследования специалист в рутинной клинической практике совмещает процесс сбора данных, выполняемый путем движения датчика рукой с анализом полученной информации. Исходные данные, полученные в ходе УЗИ, как правило, не сохраняются, в отличие от других методов визуальной диагностики, таких как КТ и МРТ, а результатом исследования является заключение, составленное врачом ультразвуковой диагностики. Данные особенности делают метод УЗИ значительно оператор-зависимым, слабо формализованным и имеющим низкую воспроизводимость (разные врачи могут дать разные заключения по одной и той же клинической ситуации). Существуют разные методы решения данного вопроса с оператор-зависимостью: создание протоколов исследования, обучение врачей. Но одним из перспективных технологических методов является применение роботических систем для выполнения УЗИ. Одним из ярких примеров является автоматизация ультразвукового исследования молочных желез.
Целью нашей публикации является обзор решений для роботизации ультразвуковой диагностики.
МАТЕРИАЛЫ И МЕТОДЫ
Поиск статей проводился в базе данных Pubmed. Запросы включали в себя такие формулировки, как «automated ultrasound» (10917 результатов за последние 5 лет), «ultrasound robotic system» (1156 результатов). Кроме того, поиск проводился на сайтах разработчиков роботических ультразвуковых систем.
РЕЗУЛЬТАТЫ
В данном разделе представлены примеры автоматизированных роботов и систем для выполнения ультразвукового исследования, а также возможности их применения в различных разделах медицины. Размеры оборудования, используемого для УЗИ, различаются, начиная от портативных устройств и заканчивая стационарными устройствами. Интервенционный ультразвук расширяет область использования ультразвуковых вмешательств почти во всех специальностях медицины, от роботизированных процедур, проводимых под контролем УЗИ, до простых пункций, также выполняемых под контролем УЗИ [1]. Несмотря на то, что ультразвуковая визуализация является широко применяемым методом диагностики, исследование выполняется в реальном времени и зависит от навыков врача ультразвуковой диагностики, что становится ограничением для применения УЗИ. Специалисты доступны только в больницах и клиниках, что снижает доступ к ультразвуковому исследованию во многих местах – сельских районах, развивающихся странах, а также в медицинских спасательных операциях [2].
В настоящее время одним из наиболее известных телемедицинских систем ультразвукового исследования является MELODY [3]. Данный комплекс состоит из роботизированной руки с ультразвуковым датчиком, манипулятор, системы телекоммуникации, включая видеоконференцсвязь. Таким образом, работа с роботизированной рукой осуществляется младшим медицинским персоналом, а дистанционное управление датчиком УЗИ и само исследование выполняет врач, который может находиться на любом расстоянии от пациента. Данные передаются с помощью интернета и отображаются у врача в режиме настоящего времени. Сферами применения MELODY являются исследование абдоминальной области, области сердца, малого таза, мочевыводящих путей, а также гинекологические и акушерские исследования. Данная система позволяет выполнять специализированные ультразвуковые исследования в медицинских учреждениях, где имеется дефицит врачей ультразвуковой диагностики (рис. 1).

Рис. 1. MELODY. Expert side – сторона эксперта (врача). Patient side – сторона пациента [3]
Fig. 1. MELODY. Expert side – сторона эксперта (врача). Patient side – сторона пациента [3]
Целью исследования Adams S.J. и соавт. была оценка возможности проведения абдоминальных исследований у взрослых с использованием телероботической ультразвуковой системы, в которой рентгенологи или врачи ультразвуковой диагностики могут контролировать точные движения датчика и все настройки ультразвука из удаленного места [4]. Восемнадцать пациентов проспективно прошли традиционное ультразвуковое исследование (с использованием EPIQ 5 [Philips] или LOGIQ E9 [GE Healthcare]) с последующим телероботическим ультразвуковым исследованием (с использованием системы MELODY [AdEchoTech] и SonixTablet [BK Ultrasound]) в соответствии со стандартизированным протоколом визуализации брюшной полости. Для телероботических исследований пациенты исследовались удаленно врачом на расстоянии 2,75 км. Обычные обследования так же проводились независимо от телероботических обследований. Оценивалось качество и приемлемость изображения для пациентов и врачей ультразвуковой диагностики. Результаты исследования показали, что в 92% случаев исследования органов, визуализированных при обычных обследованиях, были достаточно визуализированы при телероботических обследованиях. 5 патологических находок были идентифицированы как при телероботическом, так и при обычном обследовании, 3 находки были идентифицированы с использованием только обычного УЗИ, и 2 находки были идентифицированы с использованием только телероботического УЗИ. Парный образец t-тест не показал существенной разницы между 2 видами ультразвукового исследования в измерениях печени, селезенки и диаметра проксимального отдела аорты. Все пациенты ответили, что они хотели бы провести еще одно телероботическое обследование. Данная работа показала, что телероботическая ультразвуковая система подходит для проведения ультразвуковых исследований брюшной полости на расстоянии с минимальными требованиями к обучению и настройке.
Использование робота, копирующего движения врача, нашло применение и в эхокардиографии [5]. Для проверки возможности использования телероботической системы для диагностики заболеваний сердца в рутинной практике была использована система MELODY, передача данных осуществлялась при помощи 4G-LTE беспроводной сети. Видеосвязь проводилась на базе открытого кросс-платформенного протокола Wireshark. В ходе работы было проведено 10 видеоконференций в режиме реального времени, в которых врач, находящийся на расстоянии от пациента и управляющий фиктивным датчиком, проводил ЭХО-КГ, включающее B-режим, цветной допплер, M-режим, а также импульсно-волновой и постоянно-волновой допплер, по 5 видео от 2 волонтеров (рис. 2). Результаты работы показали, что теле-эхокардиографическая платформа может быть успешна применена для дистанционной диагностики. Существующие скорость передачи данных и стандарты кодирования видео позволяют без диагностических потерь проводить видеосвязь на базе полученного разрешения видео и частоты кадров.
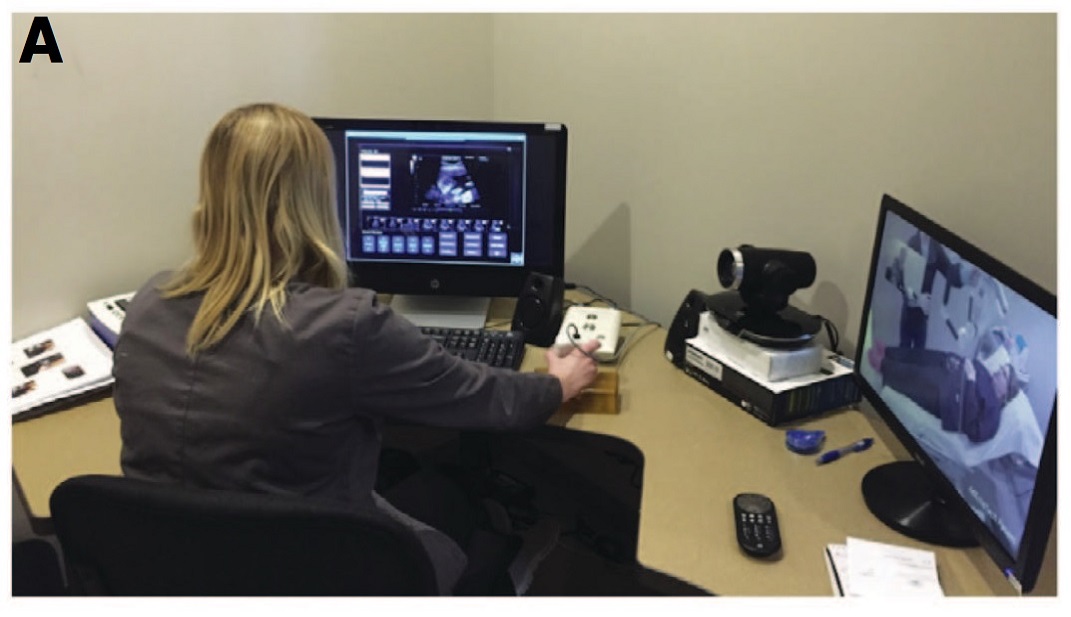
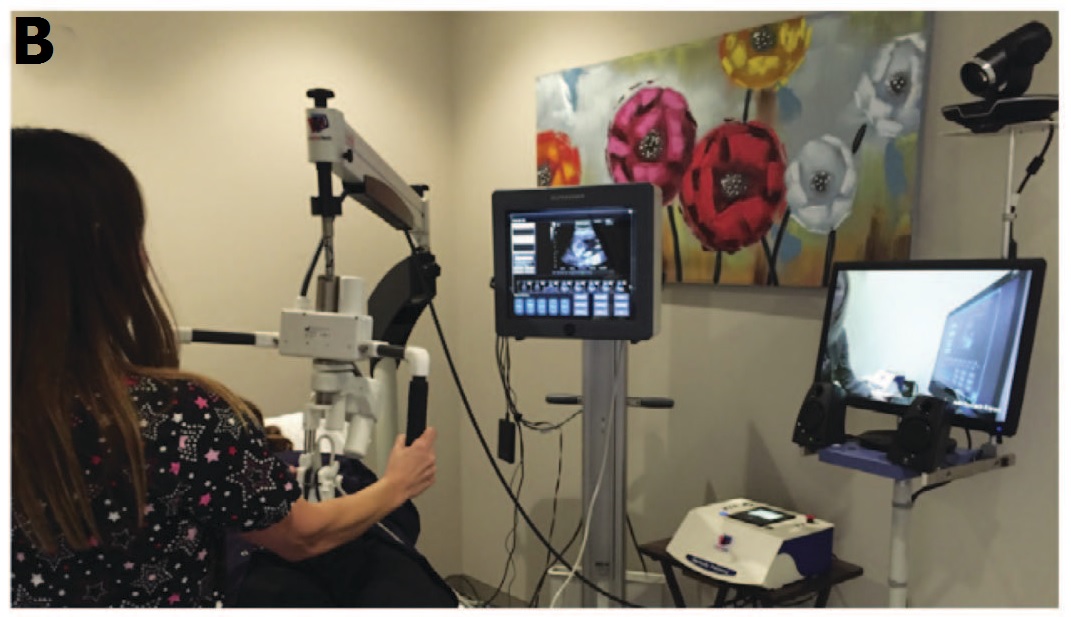
Рис. 2. Применение телеультразвука в отдаленных регионах [4, 6]
Fig. 2. Application of teleultrasound in remote regions [4, 6]
Пациенты, живущие во многих сельских и отдаленных регионах, имеют ограничения доступа к ультразвуковым исследованиям из-за отсутствия врачей ультразвуковой диагностики, поэтому важной сферой применения телероботических систем становится проведение УЗИ на расстоянии. Целью исследования Adams S.J. и соавт. было определение целесообразности использования телероботического УЗИ для обследования пациентов в отдаленных регионах [6]. В данных населенных пунктах, более чем в 500 км от академического медицинского центра, в существующих медицинские учреждения были транспортированы телероботические УЗИ системы, состоящие из управляющего устройства, роботической руки с тремя степенями свободы и прикрепленного к ней датчика УЗИ. Врачи удаленно выполняли все ультразвуковые исследования с использованием данных систем, а затем обследования интерпретировались двумя другими специалистами в академическом медицинском центре. Диагностическая эффективность оценивалась каждым врачом с использованием стандартизированной формы отчетности. Опыт пациентов оценивался путем количественного и качественного анализа ответов на опрос. По результатам 87 телероботических ультразвуковых исследований были выполнены дистанционно и включены в это исследование, причем наиболее частыми типами обследования были абдоминальные (n = 35), акушерские в первом триместре (n = 26) и акушерские во втором триместре (n = 12). Во всех типах обследования 70% телероботических ультразвуковых исследований было достаточно для диагностики, вследствие чего минимизировалось количество поездок или сократилось время ожидания для этих пациентов. 95% пациентов были бы готовы провести еще одно телероботическое ультразвуковое исследование в будущем. Основные проблемы работы с телеультразвуком были связаны с техническими вопросами, человеческими ресурсами и координацией между частями клиники, задействованными в исследовании.
Ультразвуковое исследование молочных желез является важной частью диагностики рака молочных желез. Автоматизация процесса ведет к более эффективному выполнению данного исследования. ACUSON S2000 (Siemens) является автоматизированным ультразвуковым 3D сканером, который осуществляет сбор данных с помощью датчика, поле зрения которого составляет 15 сантиметров [7]. Прибор позволяет минимизировать влияние врача на получение данных, делая исследование оператор-независимым (рис. 3).

Рис. 3. ACUSON S2000 (Siemens) – автоматизированный ультразвуковой 3D сканер [7]
Fig. 3. ACUSON S2000 (Siemens) – automated 3D ultrasound scanner [7]
Кроме того, ультразвуковое исследование молочных желез имеет преимущество перед маммографией, поскольку в нем отсутствует лучевая нагрузка на пациентку. Мультицентровое исследование Yujing Xin и соавт. с участием пяти больниц было проведено для оценки эффективности диагностики рака молочных желез с помощью автоматизированного УЗИ и классического варианта УЗИ с применение мануального датчика [8]. Подтверждения диагноза проводилось последовательно с помощью МРТ и биопсии. В исследовании приняли участие 2844 женщины, из которых 1947 полностью прошли весь процесс осмотра. Пациентки были разделены на две группы в соответствии с возрастом: группа 30–39 лет (680 участников) и 40–69 лет (1267 участников), женщинам в последней группе дополнительно проводилась маммография. По результатам исследования, чувствительность автоматизированного УЗИ для всех участников составила 91,81%, тогда как для УЗИ, проводимого специалистом, она составила 94,70%. Таким образом, общая чувствительность автоматизированного УЗИ имеет не меньшую эффективность в рамках границ не меньшей эффективности, чем выполненного специалистом. Специфичность автоматизированного УЗИ суммарно в исследуемых группах составила 92,89%, а проведенного врачом – 89,36%. Таким образом, специфичность автоматизированного УЗИ выше по эффективности. Данное исследование показывает, что применение автоматизированного УЗИ имеет свои преимущества и недостатки в сравнении с ультразвуковым исследованием, выполненным опытным специалистом. Однако значительными преимуществами автоматизации авторы выделяют стандартизацию и воспроизводимость методики и подтверждают эффективность применения автоматизированного ультразвукового исследования для скрининга рака молочных желез.
Другой автоматизированной системой для выполнения ультразвукового исследования является GE Invenia™ ABUS 2.0 (General Electric Company) [9]. Данный робот позволяет проводить объемное 3D ультразвуковое сканирование молочной железы, которое в дальнейшем анализируется врачом (рис. 4). Данные, полученные в ходе исследования, так же сохраняются и могут быть просмотрены в любое время, что позволяет накапливать исследования и сравнивать изменения во времени. Хранение данных дает возможность не только диагностировать заболевания, но и проводить оценку эффективности терапии.

Рис. 4. GE Invenia™ ABUS 2.0 [9]
Fig. 4. GE Invenia™ ABUS 2.0 [9]
Для диагностики новообразований молочных желез критично определение упругостей тканей (эластография). На данный показатель может повлиять давление датчика на ткани, которое врач или робот прикладывают при проведении УЗИ. Исследование Ling Li и соавт. было проведено для оценки применения механической руки в диагностике опухолей молочных желез [10]. В исследование были включены 128 женщин с 152 поражениями молочной железы (90 доброкачественных и 62 злокачественных) и были измерены максимальная эластичность (Vmax), средняя эластичность (Vmean), максимальная эластичность минус минимум (Vmaxmin) и минимальная эластичность (Vmin). Было также проведено сравнение повторяемости и согласованности измерений мануального датчика и механической руки. Результаты показали, что механическая рука может уменьшить влияние различных сканирующих давлений на модуль упругости ткани молочной железы.
На основе информации из баз данных Scopus, PubMed и Science Direct Shahad A.I. и соавт. был проведен систематический обзор для сравнения диагностических характеристик автоматического сканера объема молочной железы (automatic breast volume scanner – ABVS) с ручным ультразвуком (handheld ultrasound – HHUS) при дифференциальной диагностике доброкачественных и злокачественных поражений молочной железы [11]. В поиск были включены исследования с 2011 по 2020 год. Для определения критериев включения и исключения использовался проспективный метод, а уровень доказательности определялся с использованием категорий BI-RADS для диагностических исследований. Кроме того, были обобщены параметры специфичности, среднего возраста, чувствительности, числа опухолей и диагностической точности ABVS и HHUS. Среди имеющихся статей не было выявлено систематического обзора или рандомизированного контролируемого исследования, в то время как было найдено 1 поперечное исследование, 8 ретроспективных исследований и 10 проспективных исследований. Достаточное наблюдение за пациентами с доброкачественными и злокачественными находками было сделано только в 10 исследованиях, в которых только два использовали ABVS и HHUS после выполнения маммографического скрининга и МРТ. Систематический обзор был проведен для 21 исследования, которые включали 5448 поражений (4074 доброкачественных и 1374 злокачественных), взятых у 6009 пациентов. Диапазон чувствительности составлял (0,72-1,0) для ABVS и (0,62-1,0) для HHUS; диапазон специфичности составлял (0,52-0,98)% для ABVS и (0.49-0.99)% для HHUS. Диапазон точности среди 11 исследований составлял (80-99)% и (59-98)% для HHUS и ABVS, соответственно. Выявленные опухоли имели средний размер 2,1 см, а выявленные раковые заболевания имели средний процент 94% (81- 100%) по сравнению с нераковыми во всех исследованиях. Имеющиеся в литературе данные указывают на то, что диагностические характеристики как ABVS, так и HHUS аналогичны в отношении дифференциации злокачественных и доброкачественных поражений молочной железы.
Другой сферой медицины, в которой активно применяется ультразвук, является исследование плода при беременности, поскольку УЗИ является наиболее безопасным и доступным методом. Shuangyi Wang и соавт. представили iFIND (intelligent Fetal Imaging and Diagnosis) робота, представляющего собой ультразвуковую роботическую систему для исследований плода и органов брюшной полости [12, 13]. Окончательная версия данного робота состоит из двух «рук» и системы, осуществляющей их передвижение. Устройство имеет 17 степеней свободы, в каждой из «рук» находится ультразвуковой датчик, которые одновременно проводят исследование (рис. 5). Тестирование робота проводилось на 22 волонтерах. Определение поверхности исследуемого участка тела проводится с помощью Kinect сканера, данные передаются в программу робота. Устройство так же имеет датчики силы и давления, благодаря которым возможен контроль взаимодействия робота с пациентом. Управление роботом в исследовании осуществлялось дистанционно инженерами, под контролем врача лучевой диагностики. Авторы так же описывают свой опыт создания робота и обращают внимание на необходимость постоянной совместной работы инженеров, врачей и пациентов для достижения необходимых для применения в клинической практике результатов, поскольку при отсутствии взаимодействия разработчиков и тех, для кого робот разрабатывается, ожидания по комфортному использованию и внешнему виду устройства могут быть не выполнены.
Рис. 5. iFIND-v3 робот: a. УЗИ фантома плода; b. система передвижения роботических рук [12, 13]
Fig. 5. iFIND-v3 robot: a. Ultrasound of the fetal phantom; b. robotic arm movement system [12, 13]
Иной вариант, представленной Tsumura R. и соавт. ультразвуковой платформы для проведения УЗИ плода, имеет оси x и y, по которым осуществляется передвижение концевого эффектора с ультразвуковым датчиком [14]. Проверка работы осуществлялась на фантоме и трех пациентках на 28, 33 и 35 неделях беременности. Строение концевого эффектора позволяет ему пассивно приспосабливаться к неровностям поверхности, кроме того, устройство позволяет высчитывать силу взаимодействия датчика с телом. Таким образом, благодаря пассивному механизму сканирование области проводится без участия врача или ассистента, однако движение по осям x и y определялось заранее, а не самостоятельно роботом (рис. 6).
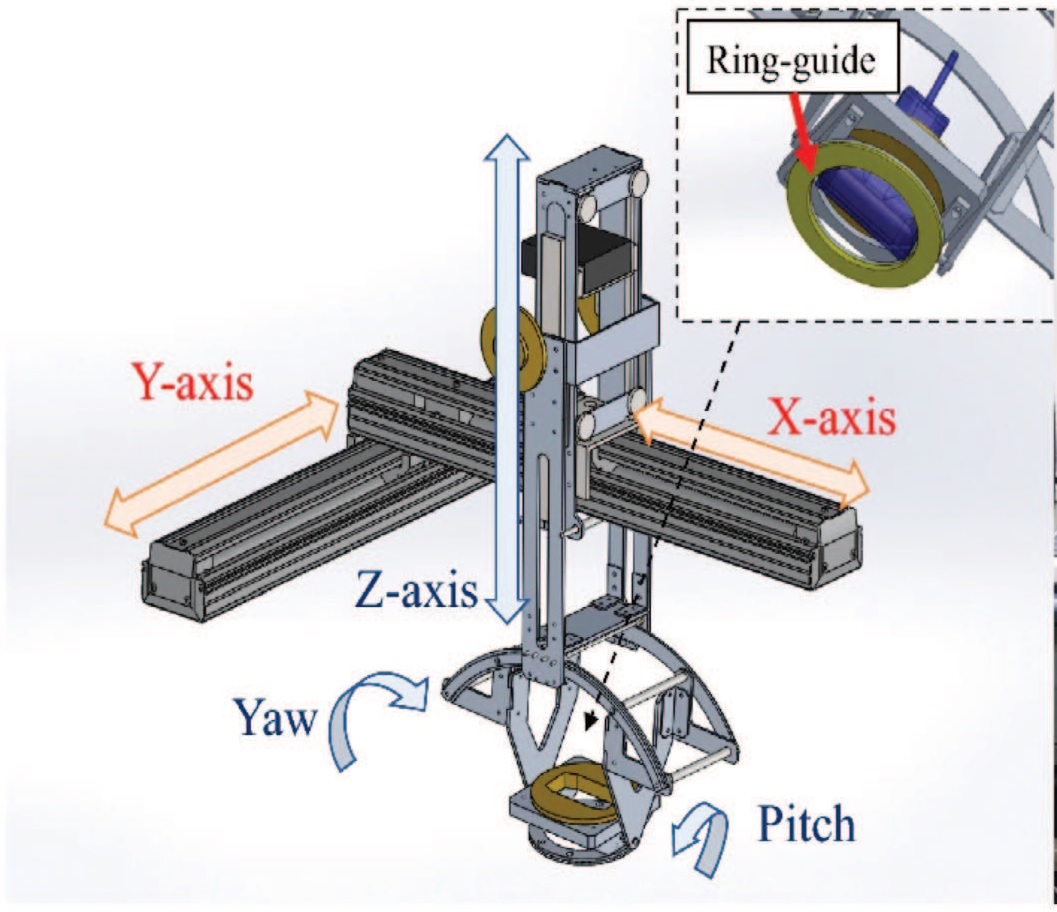
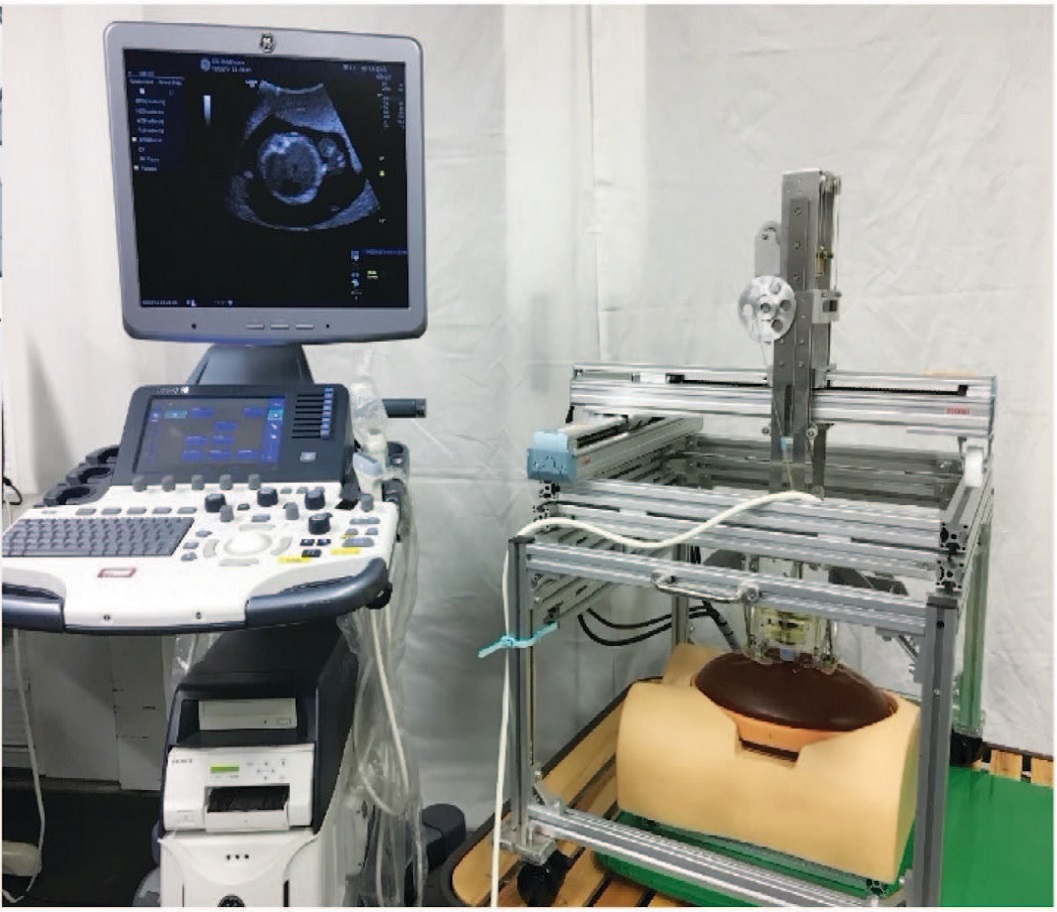
Рис. 6. Ультразвуковая платформа для пренатальной диагностики. Y-axis – Y-ось. X-axis – X-ось. Z-axis - Z-ось. Yaw – ось рыскания (вертикальная ось). Pitch – ось тангажа (поперечная ось). Ring guide -датчик УЗИ под контролем кольца [14]
Fig. 6. Ultrasound platform for prenatal diagnosis [14]
Высокую эффективность в апробации показал робот для УЗИ плода, описанный в статье Lindenroth L. и соавт. [15]. Данное устройство управляется дистанционно врачом, который приводит робота вручную к области интереса, а далее робот самостоятельно передвигается в ней. Особенностью данной работы является применение так называемой мягкой робототехники – применение эластичных, податливых и легко деформирующихся материалов для создания роботов, что значительно увеличивают количество движений робота по осям, приближая по маневренности к движениям живого существа. В данной работе были применены гидравлические приводы (fluidic actuators), позволяющие безопасно адаптировать датчик к поверхности тела, а также плетеная нейлоновая сетка вокруг датчика УЗИ, которая является подкреплением и увеличивает твердость при движении приводов вокруг оси датчика УЗИ (рис. 7). Апробация данной системы показала еe эффективность и потенциал применения в клинической практике.
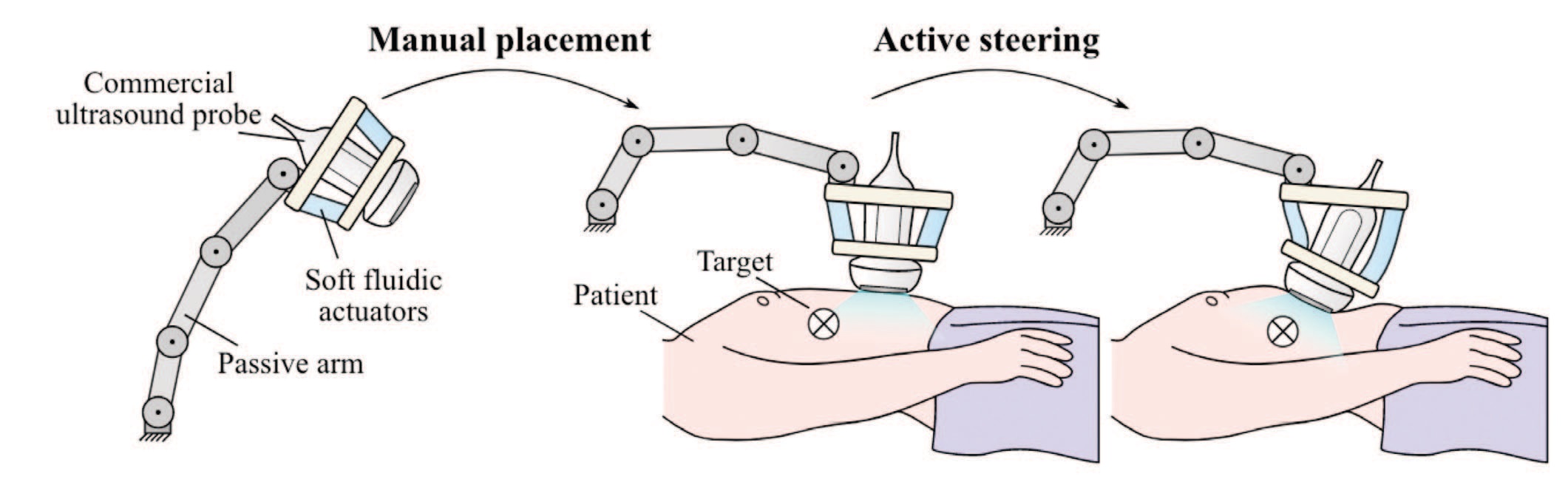
Рис. 7. Робот УЗИ с применением мягкой робототехники. Manual placement – мануальное расположение. Active steering – активное наведение. Commercial ultrasound probe – УЗИ датчик. Soft fluidic actuators – мягкие гидравлические приводы. Passive arm – пассивная рука. Patient – пациент. Target – мишень [15]
Fig. 7. Ultrasound robot using soft robotics [15]
Jakub T. Kaminski и соавт. показали применение робота УЗИ в эндокринологии, в частности диагностике заболеваний щитовидной железы [16]. В данном случае прибор состоит из 7-аксиальной роботической руки, имеющей 6 степеней свободы с датчиком силомоментного очувствления, и линейным датчиком УЗИ (рис. 8). Сканирование области интереса, то есть шеи, производится роботом автоматически и создается 3D реконструкция полученного ультразвукового изображения.
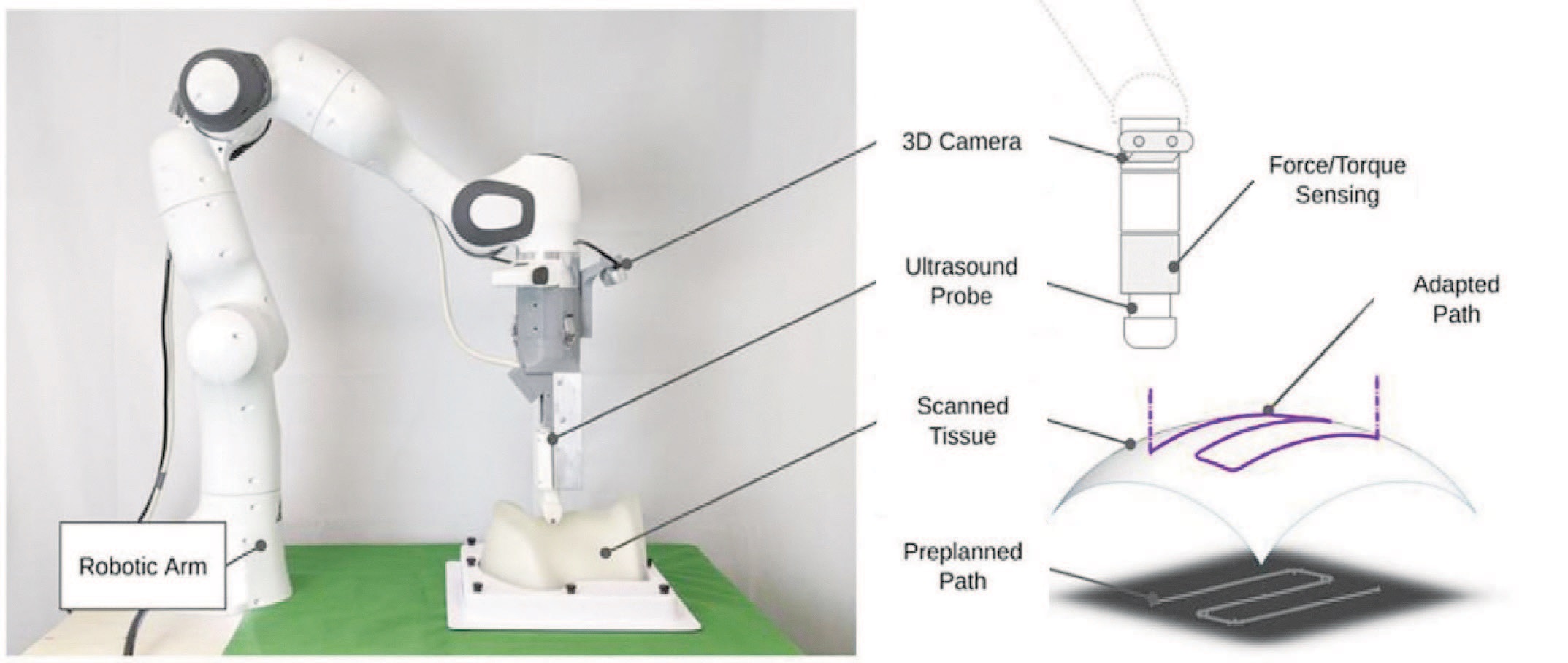
Рис. 8. Роботическая система УЗИ и ее компоненты. Robotic arm – роботическая рука. 3D camera - 3D камера. Ultrasound probe – датчик УЗИ. Scanned tissue – сканируемая область (шея). Preplanned path – запланированный путь. Force/torque sensing – датчик силомоментного очувствления. Adapted path – адаптированный путь [16]
Fig. 8. Robotic ultrasound system and its components [16]
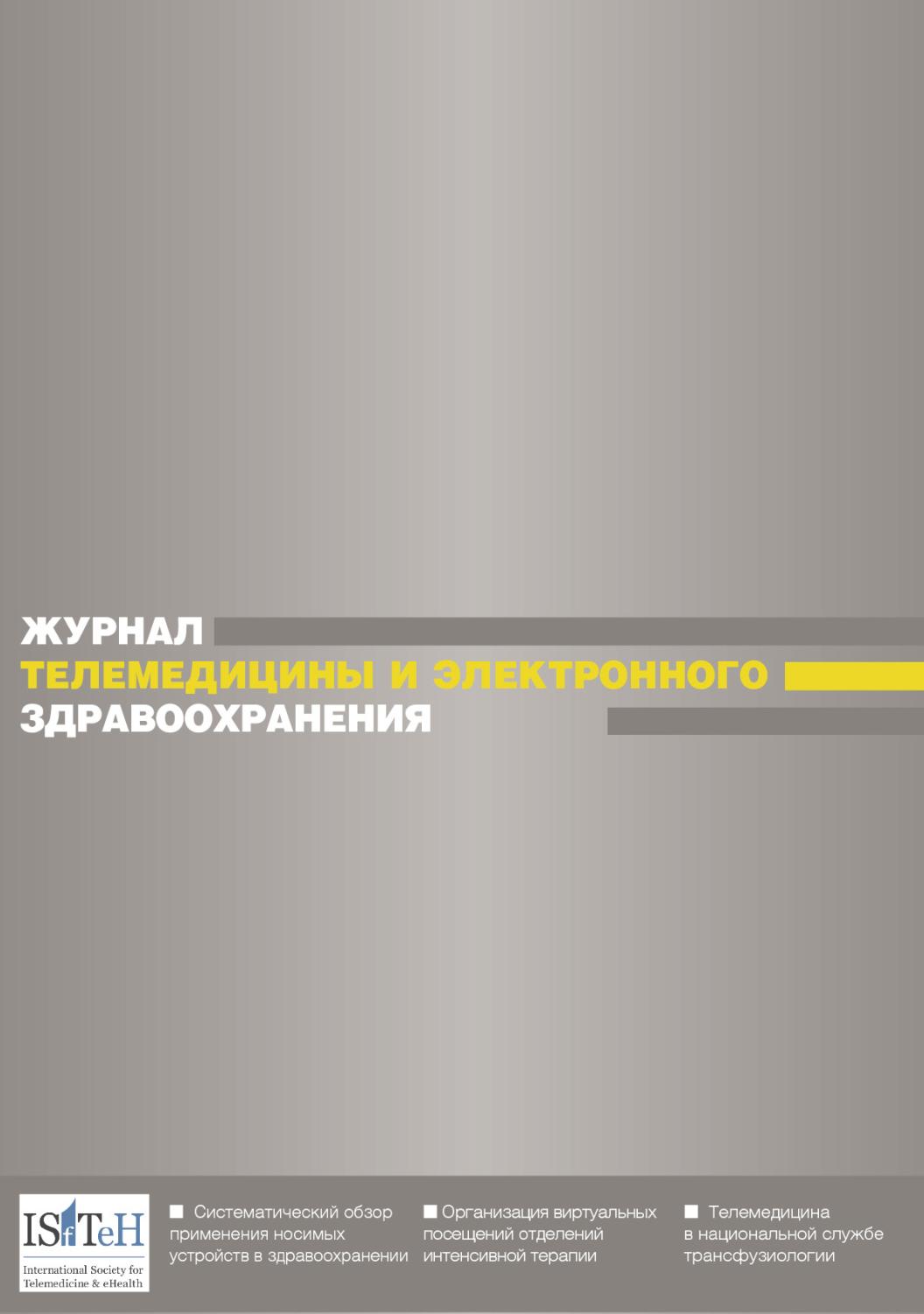
Для отображения опорно-двигательной системы так же возможно использование телеультразвукового робота [17]. Авторами был разработан робот с 4 степенями свободы, удерживающий датчик УЗИ. Робот удаленно контролируется с помощью джойстика врачом ультразвуковой диагностики. Для оценки работы данного аппарата было собрано 10 ультразвуковых исследований от 5 участников, была вычислена длительность УЗИ с помощью робота, которая в среднем составила 4,6±0,9 минут (рис. 9).
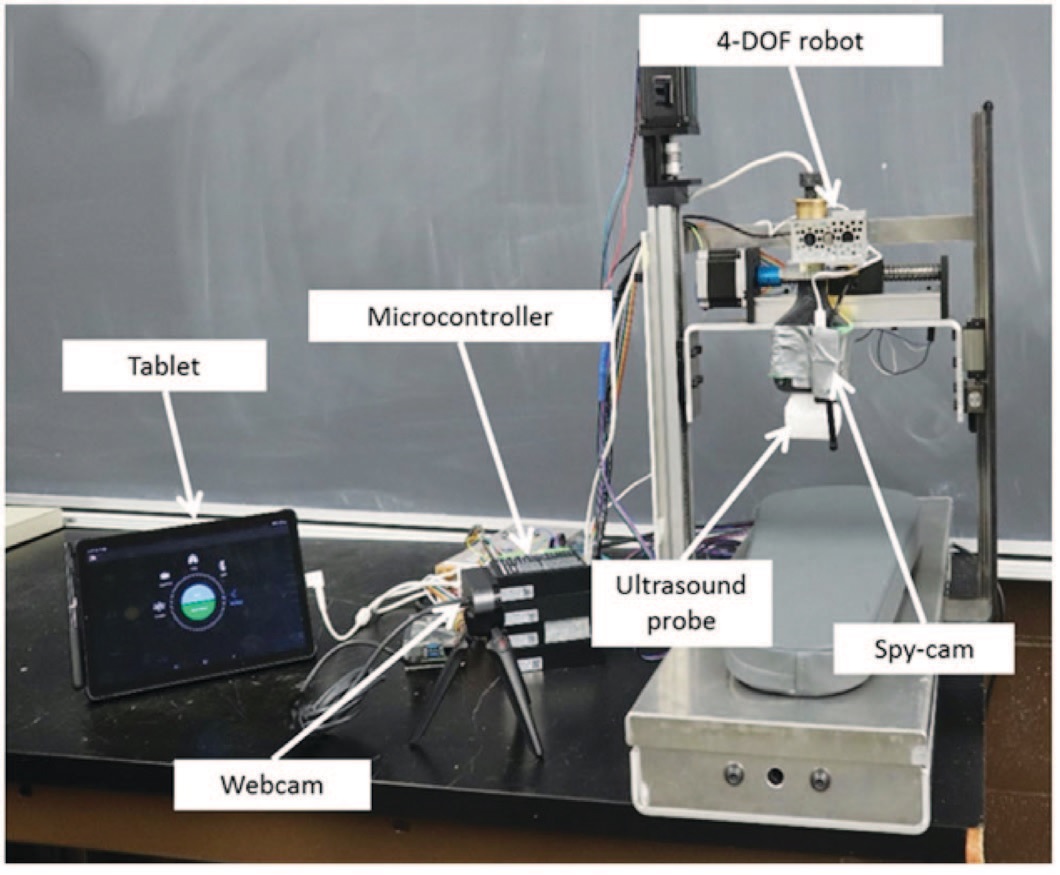
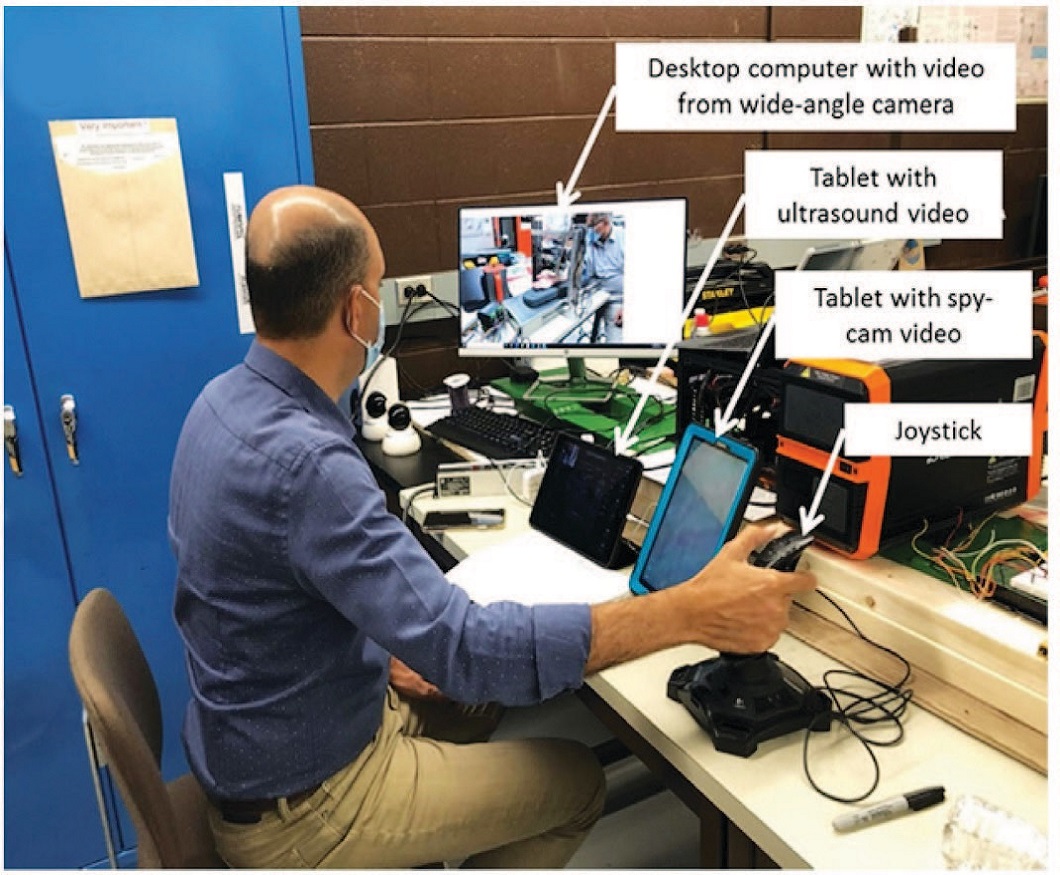
Рис. 9. Робот УЗИ для отображения опорно-двигательной системы. Tablet – планшет. Microcontroller – микроконтроллер. Webcam – веб-камера. Ultrasound probe – датчик УЗИ. Spy-cam – шпионская камера. Dekstop computer with video from wide-fngle camera. ПК с видео от широкоугольной камеры. Tablet with ultrasound video – планшет с видео УЗИ. Tablet with spy-cam video – планшет с видео со шпионской камеры. Joystick – джойстик [17]
Fig. 9. Ultrasound robot for displaying the musculoskeletal system [17]
Применение дистанционного исследования так же снижает риск передачи инфекционных заболеваний от пациента к врачу. Наиболее актуальным такой аспект является во время эпидемий и пандемий, таких как пандемия COVID-19. Akbari M. и соавт. применили арм-робота для выполнения УЗИ [18]. В данной работе были использованы роботическая рука Panda (Franka Emika GmbH, Mu-nich, Germany), Axia80-M20 сенсор силомоментного очувствления робота (ATI Industrial Automation, Apex, NC, USA) и ультразвуковой датчик, который был присоединен к концевой части руки робота (рис. 10). В настоящее время данный робот может удаленно управляться специалистом, при этом сила нажатия при сканировании определяется алгоритмом автоматически.
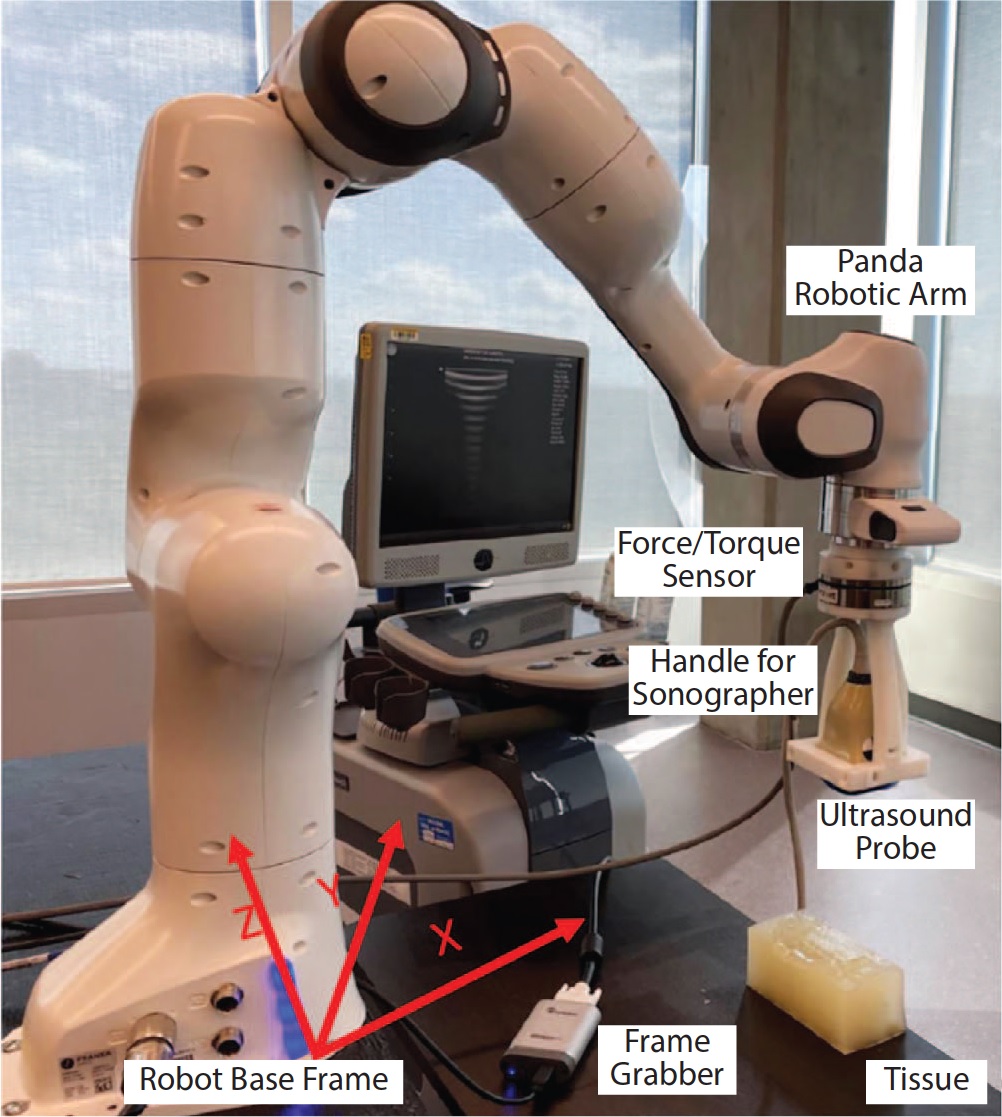
Рис. 10. Роботическая ультразвуковая система Panda. Panda robotic arm – роботическая рука Panda. Force/torque sensor - датчик силомоментного очувствления. Handle for sonographer – место для датчика УЗИ. Ultrasound probe – датчик УЗИ. Tissue – ткань. Frame grabber – плата видеозахвата. Robot Base frame – опорная рама робота [18]
Fig. 10. Robotic ultrasonic system Panda [18]
В статье Jing Wang и соавт. также описан опыт использования теле-эхографии во время пандемии COVID-19 [19]. В данном случае дистанционное управление роботом MGIUS-R3 (MGI Tech Co, Ltd (Шэнчжэнь, Китай)) осуществлял врач [20]. Рабочая станция врача включала в себя 2 монитора, на одном из которых выводилось УЗ-изображение, на втором – видео- и аудиосвязь с пациентом в режиме реального времени, благодаря которой при необходимости осуществлялось взаимодействие врача с пациентом (рис. 11). Управление роботом осуществлялось с помощью фиктивного датчика, благодаря которому происходило полное копирование движений врача. Ультразвуковое исследование пациента осуществлялось с помощью арм-робота с 6 степенями свободы, оснащенным датчиком силы, конвексным и линейным датчиками. Наличие колес у данного работа обеспечивало мобильность и возможность проведения ультразвукового исследования у кровати больного. Помощь пациенту с подбором правильной позы требовало наличие сотрудника возле робота. Передача данных осуществлялась с использованием 5G сети. В данной статье применение робота УЗИ было проведено для обследования легких, сердца, нижней полой вены и сосудов нижних конечностей.

Рис. 11. MGIUS-R3 (MGI Tech Co, Ltd (Шэнчжэнь, Китай)) [19]
Fig. 11. MGIUS-R3 (MGI Tech Co, Ltd (Shenzhen, China)) [19]
Кроме снижения риска инфицирования врачей при УЗИ инфекционных пациентах, телеультразвуковые системы нашли применение также и в диагностике коронавирусной инфекции, поскольку ранняя диагностика имеет решающее значение для профилактики и борьбы с данным заболеванием. Для решения проблемы ранней оценки изображений COVID-19 был применен протокол с использованием телеультразвука, который поддерживается сетью 5G [21]. Четыре пациента мужского пола с подтвержденным или подозреваемым COVID-19 были госпитализированы в изоляторы в двух разных городах. Два врача ультразвуковой диагностики, находящихся в двух разных городах, провели роботизированное телеультразвуковое исследование с помощью робота MGIUS-R3 и дистанционную консультацию. Были выполнены УЗИ легких, эхокардиография и УЗИ нижней полой вены. При возникновениях трудностей с дистанционным обследованием или диагностикой, дистанционная консультация проводилась вторым специалистом для достижения консенсуса. Специалисты успешно завершили телероботическое УЗИ. УЗИ легких показало признаки пневмонии различной степени во всех случаях и легкий плевральный выпот в одном случае. Нарушений структуры и функции сердца и нижней полой вены обнаружено не было. Была проведена дистанционная консультация по вопросу проведения исследования и диагностики в одном случае.
Телеуправляемая роботизированная ультразвуковая платформа Tsumura R. и соавт. так же показала эффективность применения для дистанционной диагностики респираторных инфекций, значительно снижающей контакт врачей с инфицированными пациентами [22]. Данная платформа способна выполнять УЗИ легких у пациентов, инфицированных COVID-19. Она представляет собой исполнительный механизм с пассивным приводом (passive-actuated end-effector) консольного типа, что позволяет сканировать всю поверхность грудной клетки (рис. 12). Контроль работы робота осуществляется дистанционно врачом, с помощью игрового джойстика, адаптированного для управления данной платформой. Протокол апробации работы устройства включал в себя сканирование пациента в двух позициях. Данное решение может принести значительную пользу, особенно в странах с низким и средним уровнем дохода. Авторы рассматривают упомянутые выше вопросы, связанные с использованием УЗИ легких у пациентов, инфицированных COVID19, и потенциал для распространения этой технологии в условиях ограниченных ресурсов. Кроме того, первое применение, осуществимость и безопасность были подтверждены на здоровых людях.
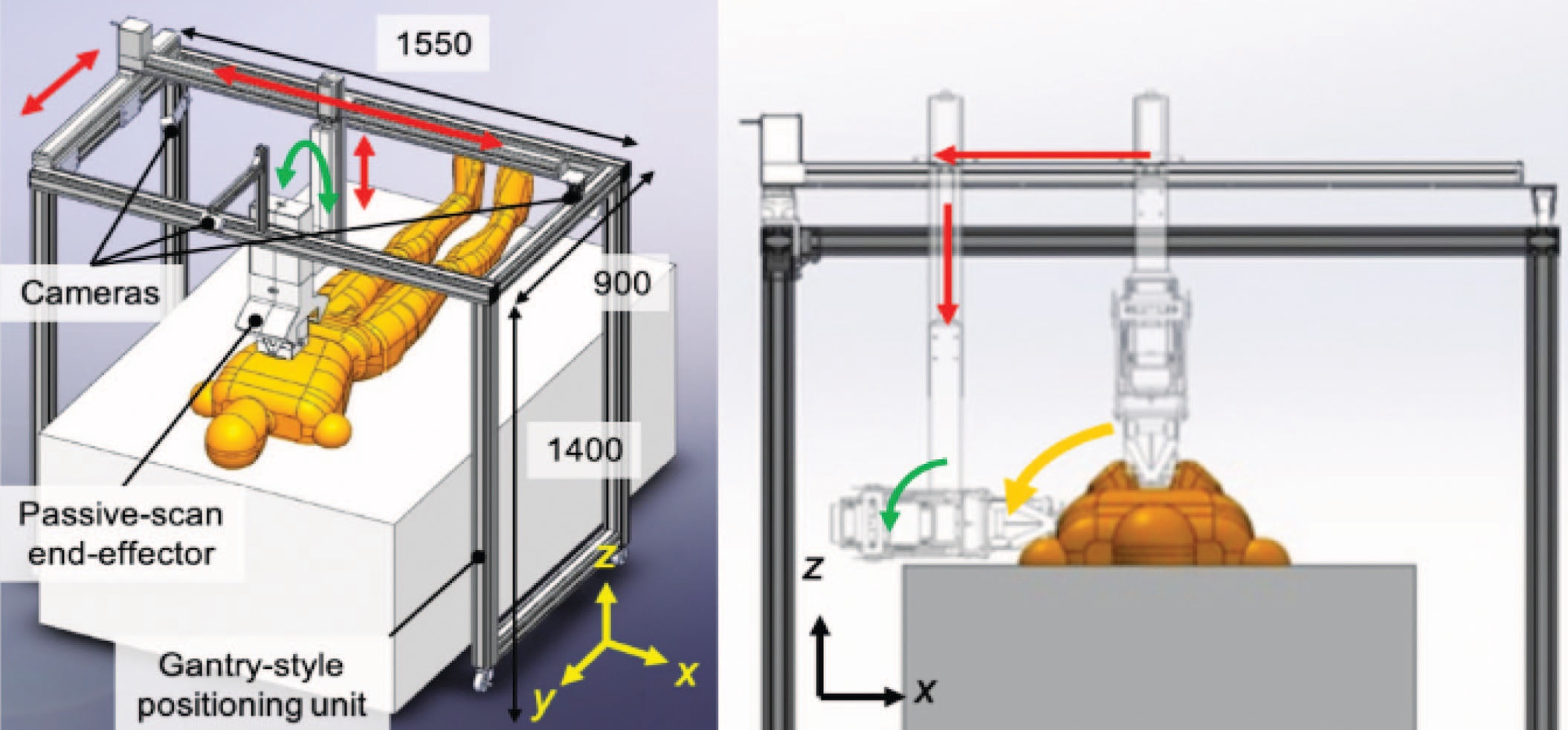
Рис. 12. Телеуправляемая роботизированная ультразвуковая платформа. Cameras – камеры. Passive-scan end-effector – концевой эффектор с пассивным приводом. Gantry-style positioning unit – механизм для передвижения концевого эффектора [22]
Fig. 12. Tele-operated robotic ultrasound platform [22]
Qinghua Huahg и соавт. представили систему, осуществляющую ультразвуковое сканирование с 3D-визуализацией [23]. Система включает в себя арм-робота с 6 степенями свободы, линейный ультразвуковой датчик, персональный компьютер для управления роботом, камеру глубины, промышленный персональный компьютер, а также два датчика силы. Камера глубины находит облако точек сканируемой ткани и далее автоматически определяет область и последовательность сканирования с учетом 3D поверхности кожи (рис. 13). Все эти данные учитываются программой для расчета позы арм-робота и выполнения дальнейшего УЗсканирования области.
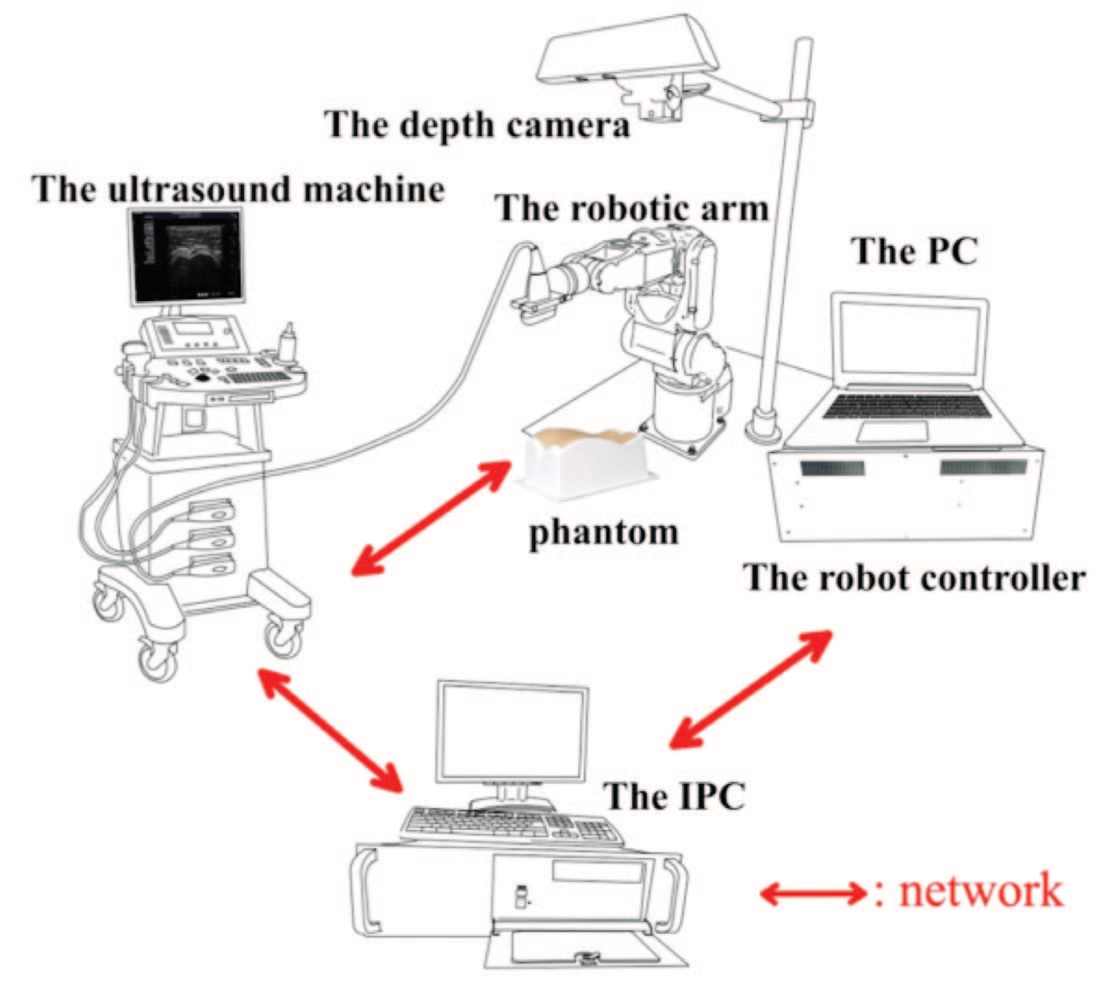
Рис. 13. Автоматизированная система 3D УЗИ. The depth camera – камера глубины. The ultrasound machine – ультразвуковой аппарат. The robotic arm т- роботическая рука. The PC – ПК. Phantom – модель. The robot controller – устройство управления роботом. The IPC – промышленный ПК. Network – сеть [23]
Fig. 13. Automated 3D ultrasound system [23]
Робот УЗИ используются не только для рутинных задач клинической медицины, но и в исследовательских целях, для изучения физиологии и патофизиологии органов на примере лабораторных животных. В работе Holmes H.L. и соавт. представлено применение автоматизированного 3D УЗИ для in vivo анализа функций почек у мышей [24].
Важной частью автоматизации процесса УЗИ является определение траектории сканирования роботом, с учетом всех неровностей поверхности, в данном случае тела пациента. Избыточная сила, с которой датчик взаимодействуют с пациентом, может привести к физическому повреждению или быть дискомфортна проходящему обследование, в то время как не достаточное давление на поверхность может привести к снижению качества получаемого ультразвукового изображения. Данные ограничения приводят к созданию решений по регулированию или автоматизации процесса сканирования. Например, одним из способов (рис. 14) предлагается использование концевого эффектора с постоянной силой, который позволяет регулировать силу, с которой происходит контакт с поверхностью тела [25].
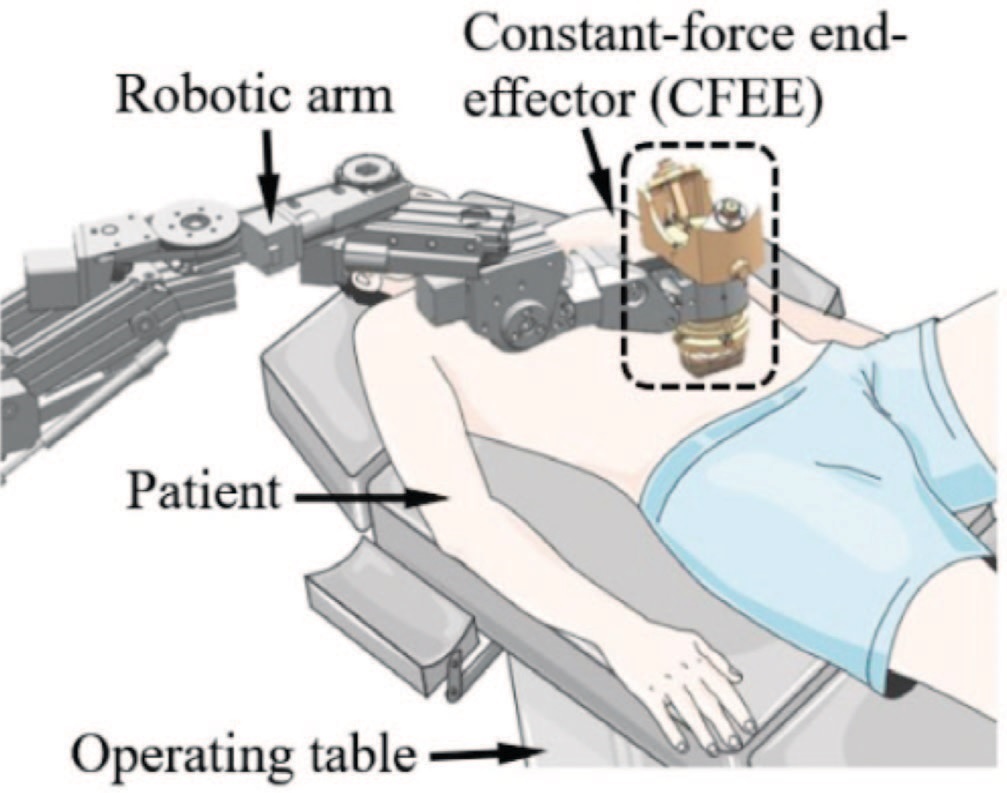
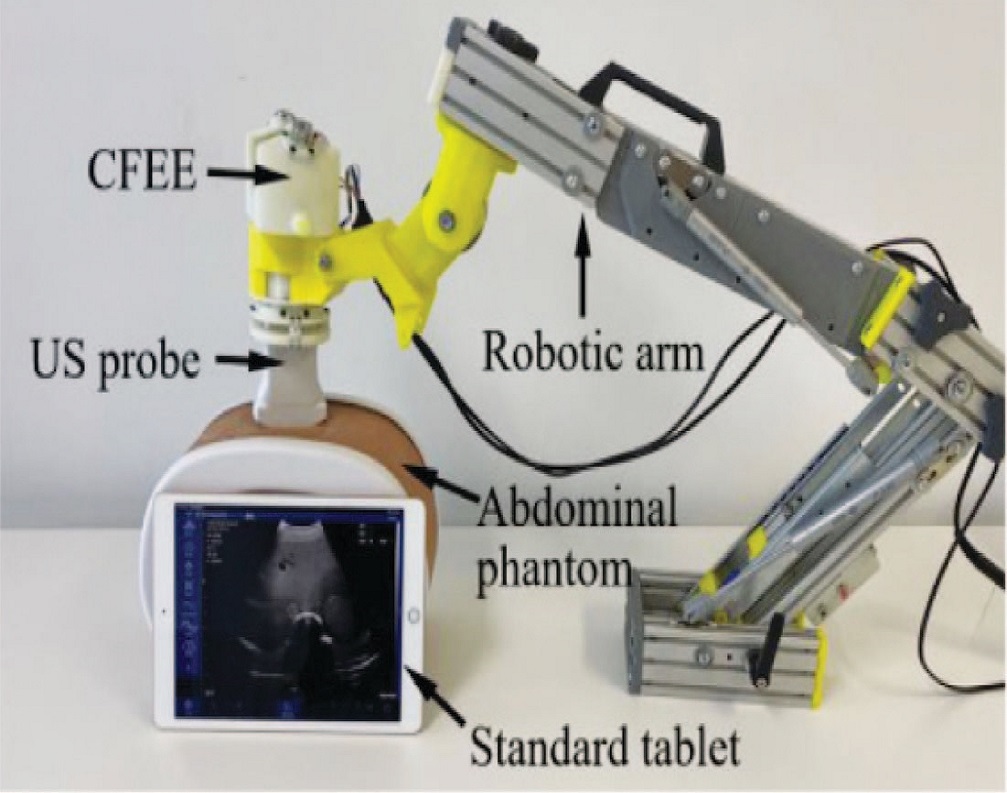
Рис. 14. Концевой эффектор с постоянной силой. Constant-force end-effector (CFEE) – концевой эффектор с постоянной силой. Robotic arm – роботическая рука. Patient – пациент. Operating table – операционный стол. US probe – датчик УЗИ. Abdominal phantom – модель абдоминальной области. Standard tablet – планшет [25]
Fig. 14. End effector with constant force [25]
В статье Shihang Chen и соавт. предложено использование прибора, основанного на оптических волноводах, который позволяет измерить распределенную силу контакта и его расположение [26]. На концах волновода находились фотодиод и светодиод, а соприкосновение с объектами приводило к деформации волновода благодаря его эластичности и изменению интенсивности света, проходящего через него (рис. 15). Калибровка полученного прибора проводилась с помощью блока силикона и тензодатчика, который фиксировал силу, прилагаемую прибором при взаимодействии с блоком. Данные с тензодатчика сравнивали с данными о напряжении на выходе, полученными с каждого волновода. В ультразвуковой системе откалиброванный прибор крепится на уровне с датчиком УЗИ и таким образом определяет силу контакта датчика с поверхностью. Для автоматизации сканирования была использована стратегия планирования пути датчика: до начала сканирования специалист приводит датчик УЗИ робота к центру сканируемой области. На основе введенных специалистом данных о длине и ширине области строится путь, который пройдет датчик. Поскольку для качественного сканирования необходимо параллельное телу расположение датчика, авторы использовали определение положения датчика по значениям прилагаемых сил на каждую из сторон прибора при контакте. На основании полученных в ходе сканирования данных строится 3D-модель области. Апробация системы, проведенная на фантоме, предплечье и бедре человека показали возможность дальнейшего ее применения. Ограничением данного ультразвукового робота является невозможность сканирования движущихся частей тела, что требует от пациента неподвижности сканируемой области.
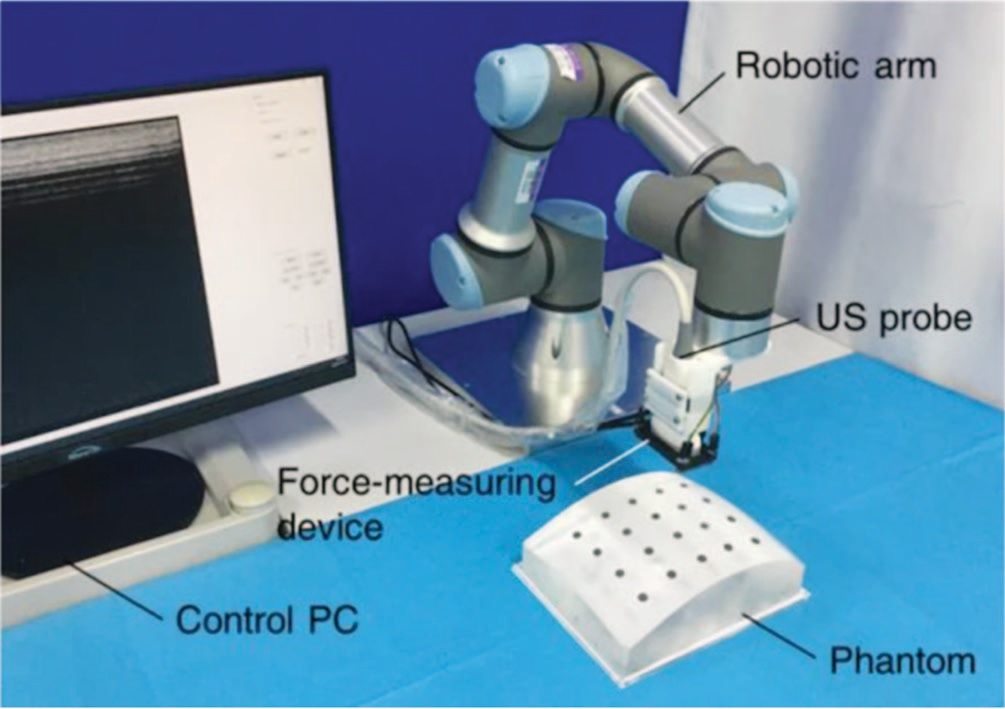
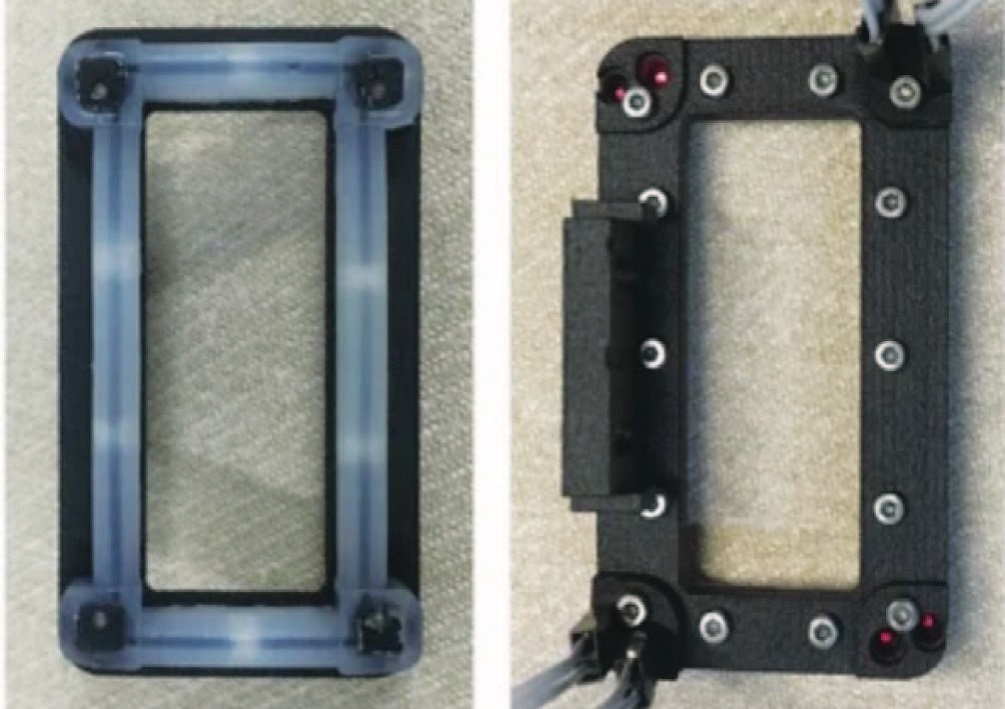

Рис. 15. Роботическая УЗИ система с измерением силы с помощью волноводов, деформация волноводов под давлением. Force-measuring device – устройства для измерения силы. Control PC – управляющий ПК. Bracket – основа. Silica gel – силиконовый гель. LED – светодиод. Fiber core – волоконный центр. Photodiode – фотодиод. Distributed force – прикладываемая сила. Microbend deformation – микродеформация [26]
Fig. 15. Robotic ultrasound system with force measurement using waveguides, deformation of waveguides under pressure [26]
Другим способом определения неровностей на поверхности стало использование машинного обучения, в частности обучения с подкреплением [27]. Предложенный метод включает три части: окружение, модель решения действия и роботический контроллер. Окружение включает в себя все аппаратное обеспечение: ультразвуковой датчик, RGB камеру, встроенный датчик силы (integrated force sensor) и робота (рис. 16). Вторая часть состоит из модели обучения с подкреплением и модели пространства состояний для принятия решений действия. Контроллер, третья часть, содержит в себе 4 команды (command mapping processes), необходимые для достижения постоянного контроля силы ультразвукового датчика. В данной системе не использовались точки координат, что позволило уйти от необходимости наличия высокоточного оборудования. Целью исследования стало обучение ультразвуковой системы автоматическому отображению цели (фантома) в изменяющемся окружении. Успешным считался результат, при котором роботу удавалось получить четкое ультразвуковое изображение цели до окончания его движения. Исследования системы на людях, показало, что качество получаемого по такому методу изображения было ниже, чем на фантоме, вследствие дыхательных движений мышц живота, что привело к дальнейшему обучению робота на фантоме, двигающемся по оси z. Однако апробация работы ультразвукового робота на поясничном отделе показала, что датчик УЗИ автоматически приводился в правильное положение и контакт с кожей был произведен с подходящей силой. Для полноценного внедрения такого метода в клиническую практику необходимо обучение в условиях, наиболее приближенных к рутинной медицинской практике, содержащих более сложное окружение и требующих более длительного времени для обучения. Однако данная модель позволяет полностью автоматизировать процесс ультразвукового исследования с возможностью определения в том числе движущегося объекта сканирования без заданных маркеров.
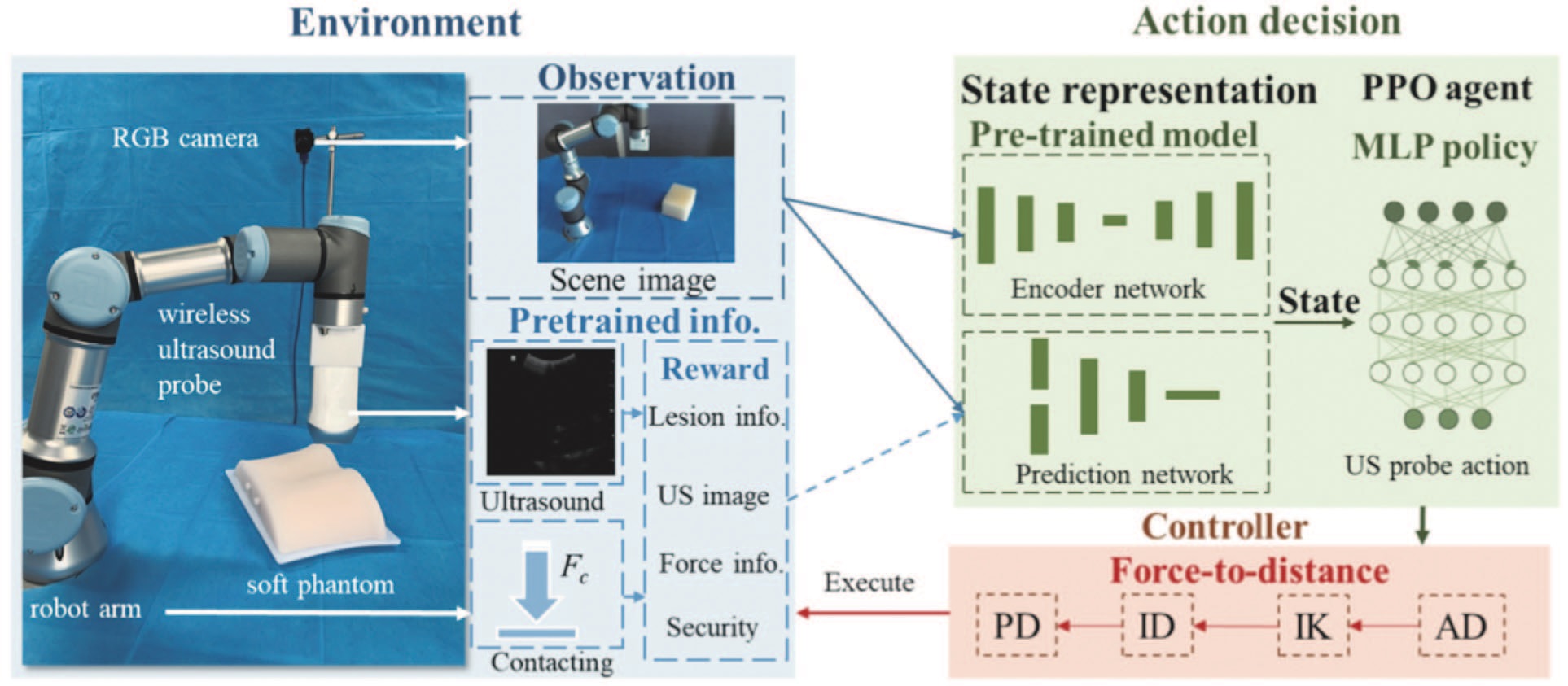
Рис. 16. Роботическая система УЗИ, основанная на обучении с подкреплением. Pre-trained model – предварительно обученная модель. Encoder network – сеть кодировщика. Prediction network – сеть прогнозирования. Us probe action – действие датчика УЗИ. Controller – контролер. Force-to-distance – соотношение силы к расстоянию. Enviroment – окружение. RGB camera – RGB камера. Wireless ultrasound probe – беспроводной датчик УЗИ. Soft phantom – фантом. Robor arm – роботическая рука. Scene image – изображение «сцены». Pretrained info – информация о предварительном обучении. Contacting – взаимодействие. Reward – награда. Lesion info – информация о повреждении. Us image – ультразвуковое изображение. Force info – информация о силе. Security – безопасность. Action decision – решение действия. State representation [27]
Fig. 16. Robotic ultrasound system based on reinforcement learning [27]
Способ, предложенный Kuan-Ju Wang и соавт., также направлен на решение проблемы определения силы и угла контакта с пациентом [28]. Ультразвуковая система представляет собой роботическую руку с шестью степенями свободы, ультразвуковой датчик, датчик давления и IMU (inertial measurement unit - гиростабилизатор) (рис. 17).
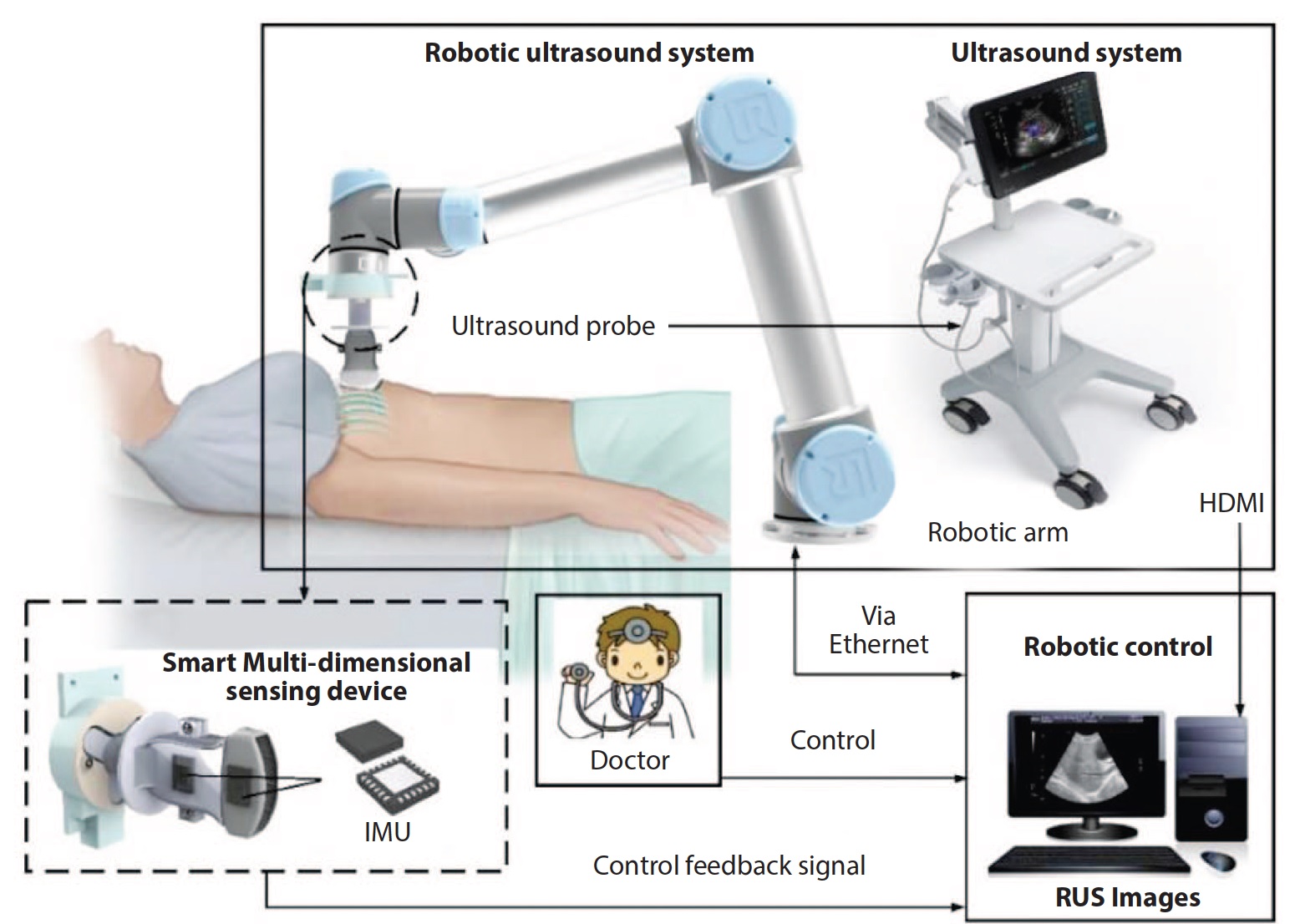
Рис. 17. Ультразвуковая система с гиростабилизатором. Via Ethernet – через интернет. Control – контроль. Control feedback signal – сигнал контроля обратной связи. Doctor – врач. Smart multi-dimensional sensing device – умное многомерное устройство. IMU – гиростабилизатор [28]
Fig. 17. Ultrasonic system with gyrostabilizer [28]
От силы взаимодействия датчика с поверхностью зависит так же и качество получаемого изображения, поэтому контроль данного параметра критичен не только для комфорта пациента, но и для получения четких и качественных изображений. Один из методов определения и корректировки вызываемой датчиком деформации основан исключительно на контроле ультразвукового изображения и информации о приложенной силе [29]. Проверка работы методики проводилась на базе роботической ультразвуковой платформы с анализом изображений из 30 датасетов, полученных от волонтеров.
В статье Ipsen S. и соавт. предлагается использование автоматизированной системы УЗИ, состоящей из коллаборативного робота и 4D ультразвуковой системы [30]. Особенностями данной работы стало исследование возможности длительного ультразвукового обследования на примере УЗИ печени и предстательной железы. Результаты данной работы показали, что динамический контроль силы, используемый авторами, может быть использован для стабильной и длительной визуализации анатомических областей, находящихся в движении, например, вследствие дыхательной экскурсии (рис. 18).
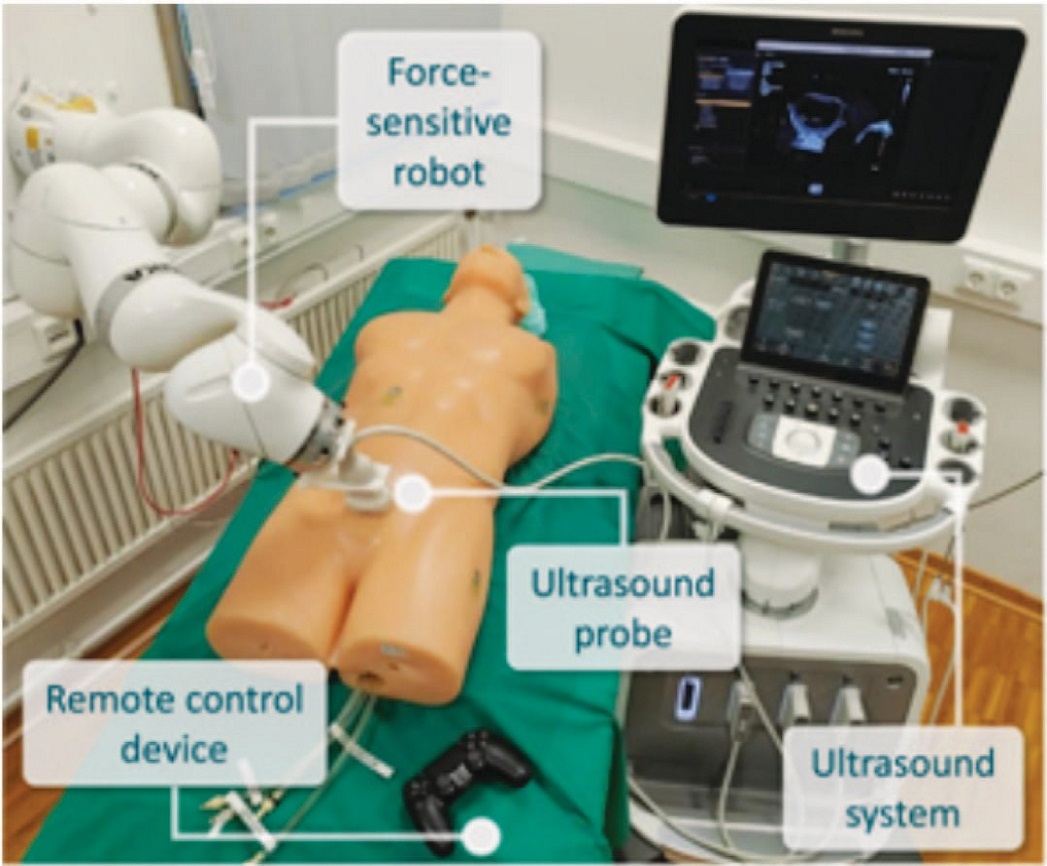
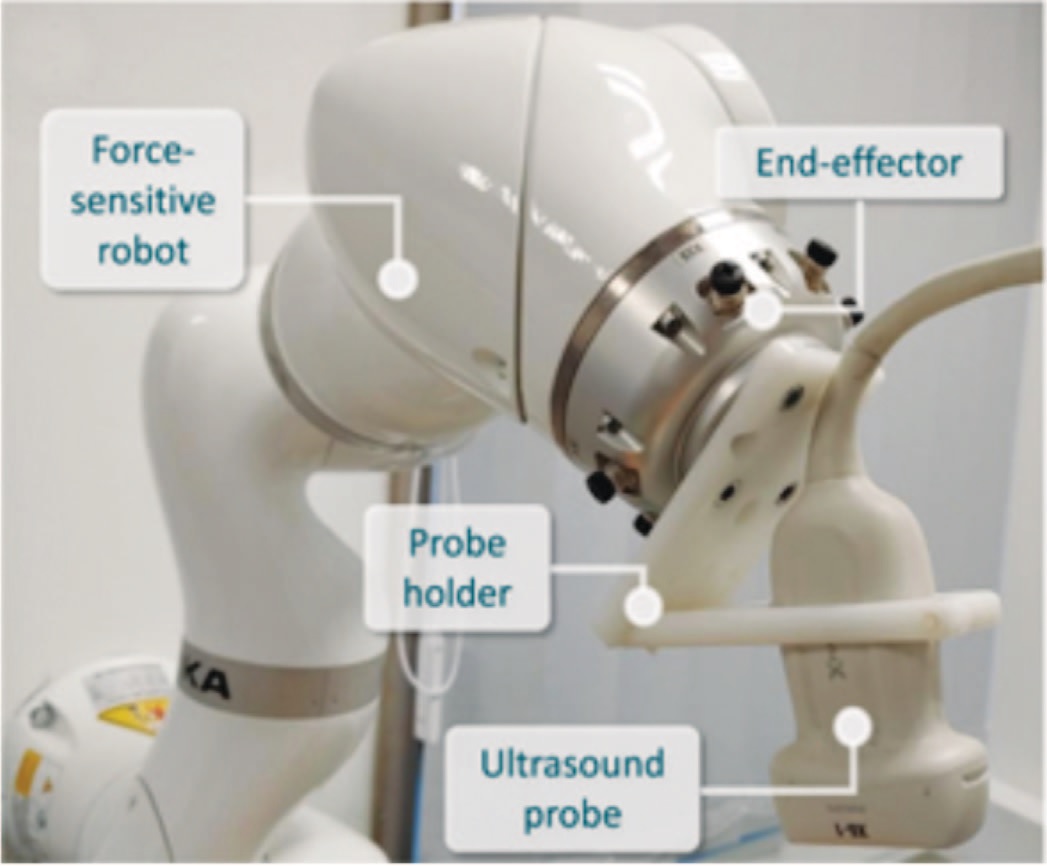
Рис. 18. Робот, чувствительный к силе. Force-sensitive robot – робот, чувствительный к силе. Ultrasound probe – датчик УЗИ. Remote control device – устройство для дистанционного управления. Ultrasound system – аппарат УЗИ. End-effector – концевой эффектор. Probe holder – держатель датчика [30]
Fig. 18. Force-sensitive robot [30]
Механизм столкновения (симулятор тактильной силовой обратной связи), разработанный Fotouhi R. и соавт., имеет также потенциал применения в роботических ультразвуковых системах [31]. Интеграция силовой обратной связи в системы имеет решающее значение для оптимизации удаленного сканирования. На основе алгоритма Гилберта-Джонсона-Кирти был разработан механизм столкновения, совместимый с устройством Haptic Wand, имеющим 5 степеней свободы [32]. Механизм столкновения вычисляет силу при столкновении между устройством и виртуальным объектом на основе кода, разработанного с использованием MATLAB (рис. 19). Пропорциональная сила была впоследствии возвращена пользователю через устройство Haptic Wand, тем самым имитируя силу столкновения для пользователя. Для оценки точности двигателя столкновения на изогнутых и плоских поверхностях были проведены три эксперимента. Средние ошибки при расчете расстояний между устройством и виртуальным объектом составили 2,1 см, 3,4 см и 4,2 см для модели человеческой руки, цилиндра и кубоида соответственно. Двигатель столкновения точно моделировал силы на плоской поверхности, хотя и был менее точным на криволинейных поверхностях. Будущая работа будет включать тактильную силовую обратную связь в телероботическую ультразвуковую систему. Представленный здесь тренажер тактильной силы также может быть использован при разработке ультразвуковых тренажеров для обучения [31].
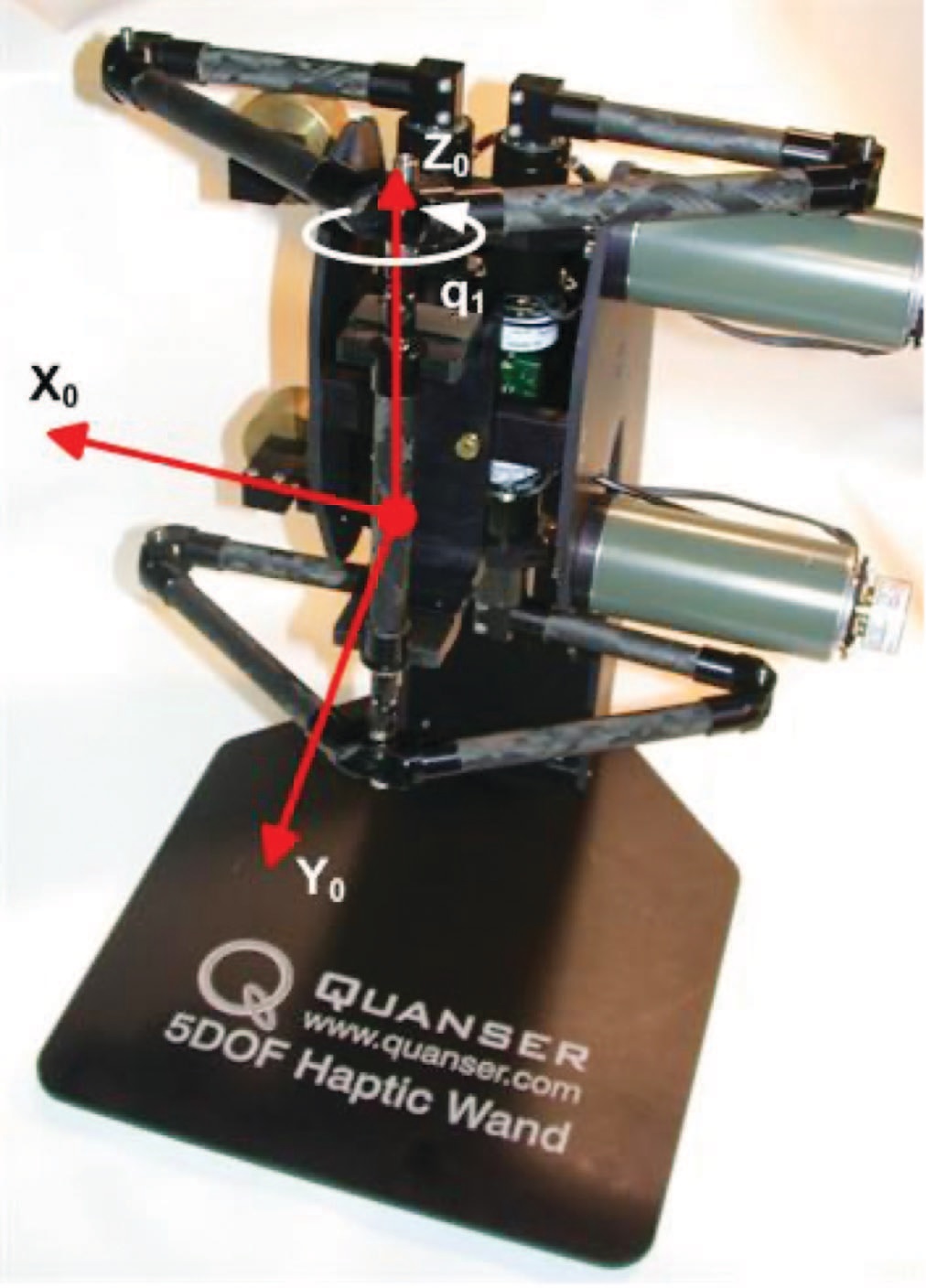
Рис. 19. Устройство «Haptic Wand» [32]
Fig. 19. Haptic Wand device [32]
Для телеультразвука в настоящее время разрабатываются не только телероботические системы, но и портативные 3D ультразвуковые бэкенд системы [2]. Данная бекэнд система выполняет 2D и полную 3D реконструкцию, включая предварительную обработку данных, beamforming и постобработку (рис. 20). Такое устройство делает работу с 3D УЗ-изображениями более доступным и снижает стоимость аналогичных систем. Авторы предлагают внедрение данного устройства в медицинскую практику, с применением его в удаленных регионах не подготовленными специалистами (не врачами ультразвуковой диагностики) для реализации телеультразвука.
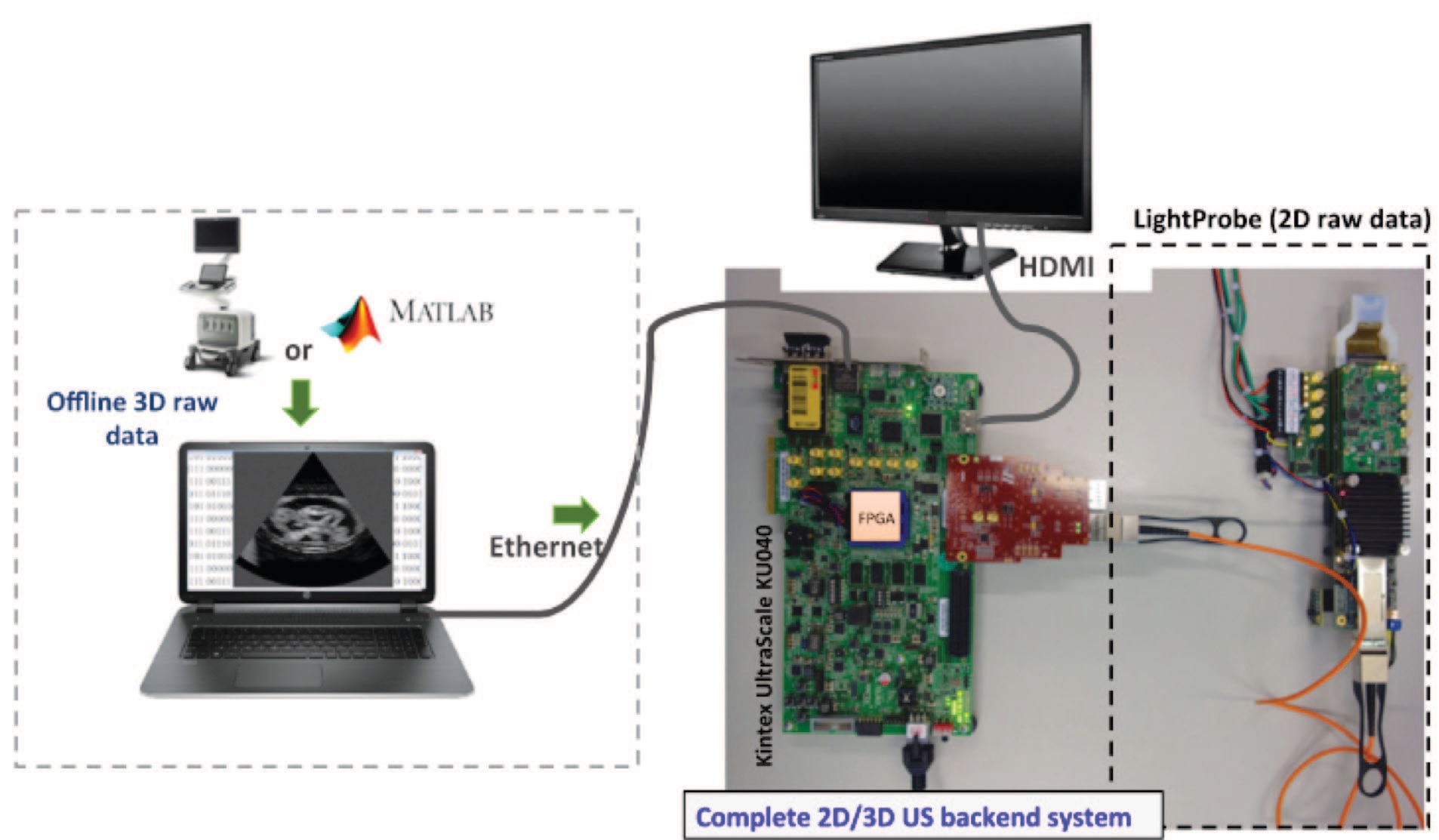
Рис. 20. Портативная 3D бэкенд-система. Offline 3D raw data – необработанные 3D оффлайн данные. Ethernet – интернет. LightProbe (2D raw data) – LightProbe (необработанные 2D данные). Complete 2d/3d US backend system – полная 2D/3D бэкенд-система [2]
Fig. 20. Portable 3D backend system [2]
В перкутанной HIFU-терапии под контролем УЗИ было предложено использование роботической руки INNOMOTION, имеющей семь степеней свободы, а также напечатанного на 3D принтере устройства для одновременного удержания HIFU и УЗИ датчиков роботом [33]. В данной статье описана разработка держателя датчиков, состоящего из поддерживающего модуля, вращающего основания, кинематических суставов, частей для присоединения ультразвукового и HIFU датчиков. Часть из деталей были напечатаны на 3D принтере (рис. 21).
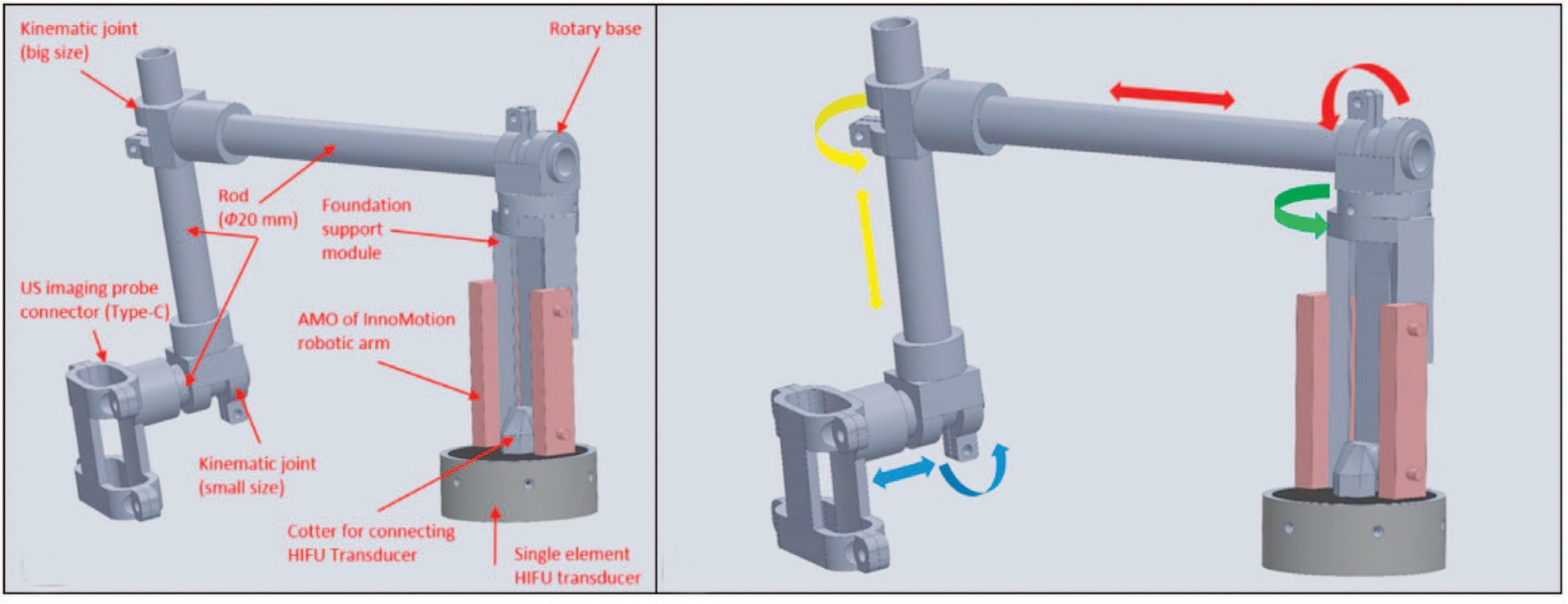
Рис. 21. 3D модель телероботической системы для выполнения HIFU под контролем ультразвука. Kinematic joint (big size) – кинематическое сочленение (большого размера). US imaging probe connector – коннектор датчика УЗИ. Kinematic joint (small size) – кинематическое сочленение (маленького размера). Rotary base – вращающаяся основа. Foundation support module – модуль поддержки основы. AMO of INNOMOTION robotic arm – модуль приложения роботической руки INNOMOTION. Cotter for connecting HIFU transducer. Single element HIFU transducer – однокомпонентный HIFU датчик [33]
Fig. 21. 3D model of a telerobotic system for performing HIFU under ultrasound control [33]
В статье Schlџter M. и соавт. так же представлено использование ультразвукового робота, под контролем которого проводится радиотерапия [34]. Ограничение, с которым столкнулись авторы, является блокировка части лучей, исходящих от радиотерапевтического робота, ультразвуковым роботом, поскольку его датчик находится гораздо ближе к телу пациента и, таким образом, ограничивает количество падающих на выбранную область лучей. Решением авторы предлагают использованием кинематически избыточного робота с возможностью координаций движений робота УЗИ и робота-источника луча (рис. 22).
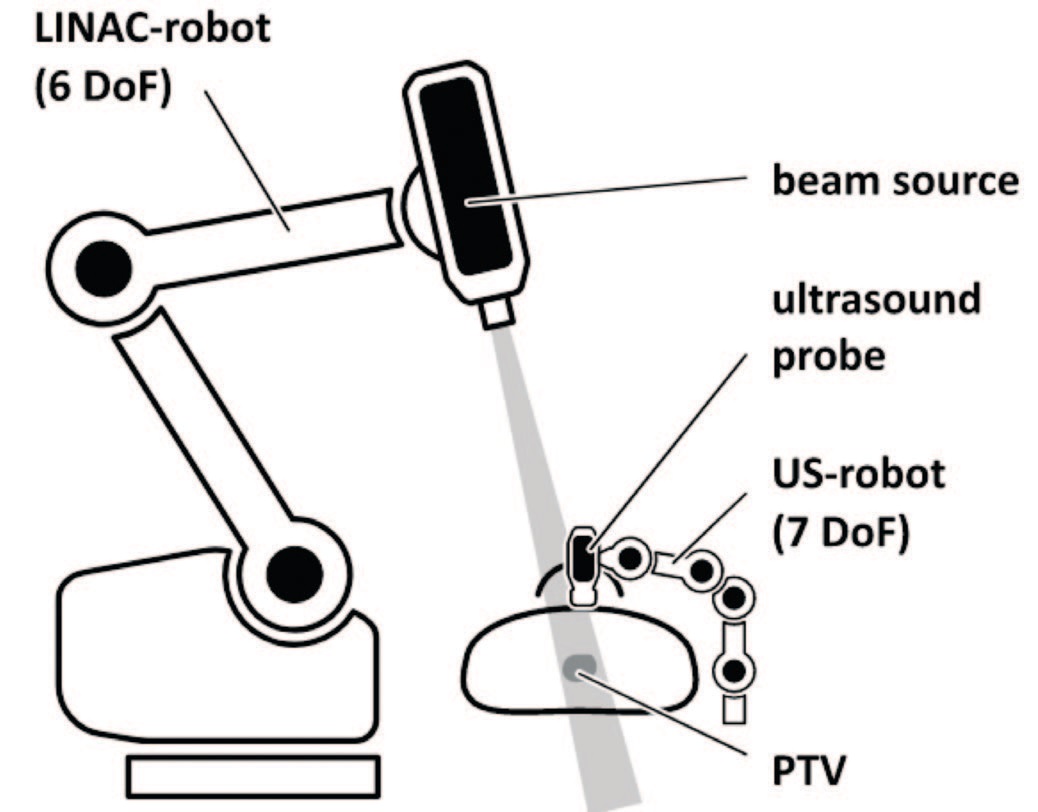
Рис. 22. Роботизированная радиотерапия под контролем УЗИ. LINAC-robot (6 DoF) – робот LINAC (6 степеней свободы). Beam source – источник лучей. Ultrasound probe – датчик УЗИ. US-robot (7 DoF) – робот УЗИ (7 степеней свободы). PTV – запланированный объем мишени [34]
Fig. 22. Robotic radiotherapy under ultrasound control [34]
В работе Gerlach S. и соавт. была проведена интеграция УЗИ-робота с Cyberknife – системой для стереотаксической лучевой терапии с компенсацией движения мишени [35]. Исследование работы проводилось на 10 клинических случаях рака предстательной железы, для каждого из которых были составлены терапевтические планы. Благодаря данным планам были определены позы робота для каждого случая, а также убраны лучи, сталкивающиеся с датчиком УЗИ (рис. 23). Это позволило повысить покрытие лучами мишени и улучшить эффективность терапии.
Рис. 23. Применение робота УЗИ для проведения лучевой терапии под контролем УЗИ [35]
Fig. 23. The use of an ultrasound robot for ultrasound-guided radiotherapy [35]
В неотложной медицинской помощи также актуально применение телеультразвука. В систематическом обзоре, проведенном Marsh-Feiley G. и соавт., произведена оценка эффективности применения данной технологии в экстренных ситуациях [36]. Поиск статей проводился в базах данных Cochrane, Medline, EMBASE и CINAHL, 4388 статей были оценены по критериям включения. В метаанализ были включены 28 статей. Результаты показали эффективность применения телеультразвука, включая его использование в отдаленных областях. Однако существующие в настоящее время клинические исследования телеультразвука требуют стандартизации по методологии для возможности воспроизведения другими авторами. Кроме того, авторы систематического обзора выделяют необходимость в исследовании минимальных требований для применения телеультразвука, таких как качество изображения, оценка точности диагностики, пропускная способность и частота кадров получаемого видео.
ОБСУЖДЕНИЕ
Проведенный поиск статей показал, что в настоящее время исследователи в данной сфере находятся в активной разработке решений для роботизации УЗИ. Только небольшое количество роботов УЗИ разрешено для использования в клинической практике. Скорее всего, в ближайшее время можно ожидать увеличение числа работ в этом направлении и появление новых готовых решений.
Проведенный нами анализ позволяет выделить цели применения роботизации в ультразвуковых исследованиях:
- Автоматизация, формализация процесса – в основе данных характеристик роботизации лежит наличие единых алгоритмов сканирования, выполняемого роботом. Таким образом, из процесса сбора данных исключаются все особенности проведения УЗИ, возникающих при выполнении исследования человеком. Преимуществами формализации является в первую очередь возможность сравнения результатов исследований, а также возможность повторного проведения УЗИ, при котором последовательность сбора информации датчиком будет идентична. Снижение субъективности интерпретации результатов повышает эффективность применения роботизированного УЗИ в клинической практике.
- Дистанционное управление роботом УЗИ позволяет выполнять исследования специалистом, находящимся на любом расстоянии от пациента как в другом кабинете, так и в другом городе. Это позволяет применять роботов УЗИ в регионах с дефицитом врачей ультразвуковой диагностики, повышая доступность данного исследования. Кроме того, некоторые авторы предлагают применение дистанционного управления для снижения контактов врачей с пациентами в инфекционных отделениях.
- Разделение процесса сканирования и анализа. В рутинной клинической практике врач ультразвуковой диагностики вынужден одновременно с проведением УЗИ анализировать изображения на экране аппарата ультразвуковой диагностике, при этом данные – видео или фото – зачастую не сохраняются. Описание нормальной или патологический ультразвуковой картины производится параллельно самому исследованию, без возможности возвращения к видео в дальнейшем, что может снижать его точность и повышать субъективность. В свою очередь проведение УЗИ роботом обеспечивает сохранение данных, позволяя вернуться к исходным данным в любое удобное для врача время, а также при необходимости отправить их другим врачам для получения второго мнения.
- Снижение нагрузки на врача и увеличение прецизионности. Поскольку выполнение УЗИ роботом выводит врача из процесса сбора данных, это снижает нагрузку и дает возможность для более углубленного изучения результатов. Увеличение точности выполнения УЗИ связано с наличием алгоритмов, по которым робот выполняет каждое исследование с одинаковой точностью, что также снижает количество потенциальных ошибок, связанных с человеческим фактором.
В настоящее время наибольшее применение в клинической практике получила трехмерная автоматизированная ультразвуковая система анализа молочной железы (3D ABUS). Данная технология позволяет решить основные недостатки традиционного ультразвука, такие как отсутствие стандартизации, низкая воспроизводимость, небольшое поле зрения [37]. Ее преимуществом является возможность сохранения данных, их удаленный просмотр врачом. Кроме того, контроль взаимодействия пациента с роботом осуществляется средним медицинским персоналом, что не требует присутствия врача в момент исследования.
Телероботическое УЗИ может открыть возможность создания удаленных ультразвуковых клиник для регионов, которым не хватает квалифицированных врачей ультразвуковой диагностики, что значительно улучшит доступ к медицинской помощи [4]. В перспективе телероботический ультразвук может обеспечить доступ к диагностическим ультразвуковым исследования в недостаточно обслуживаемых сельских и отдаленных регионах без регулярного доступа к УЗИ [6]. Однако мы, авторы данного обзора, считаем, что в силу того, что такой подход телемедицинского УЗИ, когда врач и пациент вынуждены находиться одновременно за рабочими местами и наличия технологических сложностей, связанных с дистанционным управлением, будет являться сдерживающим в развитии такого подхода, так как данный подход не приводит к экономии времени и не может в масштабе решить вопрос дефицита кадров. Одновременное нахождение врача и среднего медицинского персонала во время проведения дистанционного УЗИ, большой поток передаваемой информации, требующей высокоскоростного интернета, необходимость в качественной аудио- и видеосвязи в режиме реального времени становятся ограничением для применения в удаленных регионах, поскольку требует значительных технологических и человеческих ресурсов для качественного функционирования всей сложной системы. Решением этой проблемы является использование автономных роботов УЗИ без дистанционного управления. В перспективе их применение снижает количество одновременно задействованного медицинского персонала, а также может отсрочить и разделить между собой сбор данных и их дальнейшую передачу врачу, что снижает требования к скорости передачи данных и, соответственно, скорости интернет-соединения.
Кроме преимущества применения в местах с дефицитом врачей, телеультразвук делает ультразвуковую диагностику доступной в инфекционных изоляторах, где необходимо снизить количество контактов пациентов с врачами. Врачи могут быть защищены от инфекции при выполнении дистанционной диагностики, а контроль качества может быть обеспечен удаленными консультациями.
Ряд вмешательств в медицине в настоящее время проводятся под контролем УЗИ, что позволяет точно определять локализацию мишени, на которую будет осуществлено воздействие, и снижает риск ошибок. В данной сфере также возможно применение роботических ультразвуковых систем.
В статьях не всегда приведены названия типов роботов в соответствии с существующими классификациями, однако наш анализ позволил разделить роботов, включенных в обзор, в зависимости от их типа. Пункты классификации дополнены ссылками на примеры конкретных роботов, описанных в статье:
- Специально созданные для УЗИ [3, 9];
- Роботизированные руки или арм-роботы. Наиболее перспективными являются коллаборативные роботы (коботы) [18, 30];
- Аксиальные роботы (декартовые роботы) [14, 22];
- Авторская конструкция робота-манипулятора [25].
Стоит отметить, что авторы приборов для описания строения роботов часто используют понятие «роботизированная рука» (arm robot, арм робот). Если строго относиться к терминологии, то арм-роботы – это отдельный класс специализированных роботов, нашедший свое применение в промышленной автоматизации. В подавляющем большинстве статей авторы используют это понятие для описания созданной ими специальной конструкции, приводящее в движение датчик УЗИ, но с инженерной точки зрения это не является арм-роботом.
В части публикаций мы встретили описание применения классического арм-робота, к концевой части которого прикреплен датчик УЗИ. Преимуществами таких роботов является доступность, возможность производства на основе существующих арм-роботов. В основе такой роботизации лежит общий принцип строения таких роботов, обеспечивающий движения, аналогичные движению человеческой руки, что приближает роботический метод к привычному обследованию или терапии с участием врача. Однако в настоящее время в клинической практике нашли применение роботы, созданные специально для ультразвуковых исследований, такие как MELODY, не попадающие под классическую классификацию роботов, используемых в других сферах, например, на производстве. Именно данный тип роботов имеет разрешение для использования в клинической практике и применяется в настоящее время в ряде стран наравне с мануальным способом проведения УЗИ. По мнению авторов обзора, использование стандартных промышленных роботов будет иметь ограничение в силу того, что такие роботы избыточны для целей ультразвуковой диагностики. Несмотря на то, что УЗИ является критическим методом диагностики, он не требует высокой прецизионности при манипуляции, которой обладают стандартные промышленные роботы. Такая избыточность повышает потенциально стоимость и без того не дешевого решения, увеличивает габариты и вес готового продукта. Вероятнее всего, для таких медицинских манипуляций, как УЗИ, будут создаваться специальные роботы.
Особенностью работы с автоматизацией УЗИ является необходимость в обратной связи при соприкосновении датчика с телом пациента, регуляция давления датчика на поверхность, а также определения области сканирования. Данные опции накладывают значительное ограничение на применение роботов для взаимодействия с пациентом, поэтому требуют поиска технологий, которые способны обеспечить определение и управление силой нажатия, а также поиск областей сканирования.
Перспективным видится совмещение роботов и протоколов, таких как FAST, используемых в неотложной медицинской помощи для экстренной диагностики травм, однако подобные примеры в литературе не были найдены [38]. Но в настоящее время проводятся исследования и внедрения в клиническую практику упрощенных протоколов проведения УЗИ, которые позволяют выполнять ультразвуковое обследование персоналу без опыта проведения УЗИ и знания анатомических структур [39, 40]. В таком случае данные, полученные по определенному алгоритму движения датчика, сохраняются и передаются врачу ультразвуковой диагностики для дальнейшего анализа. Это позволяет успешно применять УЗИ в местах с дефицитом специалистов. По результатам работы были проведены обследования 22 пациентов по протоколу для щитовидной железы, 29 пациентов по протоколу для правого верхнего квадранта (ПВК) и 16 пациентов – для акушерского УЗИ. 96% изображений были подходящего для анализа врачом качества. Средний размер файлов для акушерского анализа, анализов ПВК и щитовидной железы составили соответственно 20,6 МБ, 10,3 МБ и 6,5 МБ. Время обследования для изображений с самым высоким качеством составили 27 секунд для пациенток в третьем триместре беременности, 20 секунд для пациенток во втором триместре, 13 секунд для исследования ПВК и 10 секунд для щитовидной железы [40]. Данные исследования показывают возможность создания алгоритмов ультразвукового сканирования областей тела, при которых не требуется присутствие врача. Подобные решения перспективны для внедрения в роботические ультразвуковые системы с возможностью записи данных и последующего их анализа специалистом.
Перспективным является использование роботов для разделения получения информации и ее анализа. Такой подход с одной стороны требует преодоления технологических барьеров, таких как создание роботов, способных к самостоятельному поиску областей исследования, передачи данных, их возможной обработки, а, с другой стороны, может увеличить пропускную способность и автоматизировать процесс УЗИ и увеличить эффективность благодаря тому, что врач исключается из процесса сбора информации и находится только на этапе анализа данных.
За рамками нашего исследования мы оставили вопрос использования интеллектуальных инструментов для диагностики, лежащих в основе искусственного интеллекта, однако стоит сделать акцент на том, что такие инструменты имеются сейчас и развиваются, и кажется крайне перспективным их совмещение с роботизацией процесса.
ЗАКЛЮЧЕНИЕ
Роботизация ультразвукового исследования включает в себя множество технологических решений: роботы-манипуляторы, системы навигации и позиционирования6 системы обратной связи, обработка, передача и хранение визуальных данных, алгоритмы на базе искусственного интеллекта.
Использование роботов для проведения ультразвукового исследования значительно облегчает проведение данной процедуры в удаленных регионах с дефицитом врачей ультразвуковой диагностики, что обеспечивается дистанционным управлением или автономностью роботов. Применение роботов УЗИ является перспективным для снижения нагрузки на врачей ультразвуковой диагностики и увеличения прецизионности, разделения процессов сбора данных и их анализа, а также изменения процесса ультразвукового исследования с повышением его воспроизводимости и уходом от оператор-зависимых технологий благодаря автоматизации и формализации процесса.
На пути создания решений на сегодняшний момент существуют серьезные технологические барьеры. Вероятнее всего, мы находимся сейчас на этапе преодоления данных ограничений, после преодоления которых можно ожидать появления большего числа готовых решений.
ЛИТЕРАТУРА
1. Nielsen MB, Sogaard SB, Andersen SB, Skjoldbye B, Hansen KL, Rafaelsen S, et al. Highlights of the development in ultrasound during the last 70 years: A historical review. Acta Radiol 2021;62(11):1499–1514.
2. Ibrahim A, Zhang Sh, Angiolini F, Arditi M, Kimura S, Goto S, et al. Towards Ultrasound Everywhere: A Portable 3D Digital Back-End Capable of Zone and Compound Imaging. IEEE Trans. Biomed. Circuits Syst 2018;12(5):968–981.
3. MELODY – Telerobotic ultrasound solution [Electronic resource]. AdEchoTech. URL: https://www.adechotech.com/products/ (accessed: 04.06.2022).
4. Adams SJ, Burbridge BE, Badea A, Langford L, Vergara V, Bryce Rh, et al. Initial Experience Using a Telerobotic Ultrasound System for Adult Abdominal Sonography. Can Assoc Radiol J 2017;68(3):308–314.
5. Avgousti S, Panayides AS, Jossif AP, Christoforou EG, Vieyres P, Novales C, et al. Cardiac ultrasonography over 4G wireless networks using a tele-operated robot. Healthcare Technology Letters 2016;3(3):212–217.
6. Adams S, Burbridge SJ, Chatterson L, Babyn P, Mendez I. A Telerobotic Ultrasound Clinic Model of Ultrasound Service Delivery to Improve Access to Imaging in Rural and Remote Communities. Journal of the American College of Radiology 2022;19(1):162–171.
7. ACUSON S2000 Automated Breast Volume Scanner. [Electronic resource]. URL: https://www.siemens-healthineers.com/en-us/marketing-toolkits/ultrasound-marketing-toolkit/acuson-s2000-abvs-marketing-toolkit (accessed: 06.06.2022).
8. Xin Y, Zhang X, Yang Y, Chen Y, Wang Y, Zhou X, et al. A multicenter, hospital-based and non-inferiority study for diagnostic efficacy of automated whole breast ultrasound for breast cancer in China. Sci Rep 2021;11(1):13902.
9. GE InveniaTM ABUS 2.0. [Electronic resource]. URL: https://ge-ultrasound.eu/ voluson-gynecology-obstetrics/invenia-abus-2-0/ (accessed: 04.07.2022).
10. Li L, Lv G, Shen H, Liao L, Zhong R, Zheng Ch, et al. Applications of Mechanical Arm in the Virtual Touch Tissue Imaging Quantification and the Differential Diagnosis of Breast Tumors. Ultrasound Quarterly 2022;38(1):25–30.
11. Ibraheem SA, Mahmud R, Saini SM, Hassan HA, Keiteb AS, Dirie AM, et al. Evaluation of Diagnostic Performance of Automatic Breast Volume Scanner Compared to Handheld Ultrasound on Different Breast Lesions: A Systematic Review. Diagnostics 2022;12(2):541.
12. Wang S. Robotic-Assisted Ultrasound for Fetal Imaging: Evolution from Single-Arm to Dual-Arm System. Towards Autonomous Robotic Systems. ed. Althoefer K, Konstantinova J, Zhang K. Cham: Springer International Publishing 2019(11650):27–38.
13. Wang S, Housden J, Noh Y, Singh A, Back J, Lindenroth L, et al. Design and Implementation of a Bespoke Robotic Manipulator for Extra-corporeal Ultrasound. JoVE 2019(143):58811.
14. Tsumura R, Iwata H. Robotic fetal ultrasonography platform with a passive scan mechanism. Int J CARS 2020;15(8):1323–1333.
15. Lindenroth L, Housden RJ, Wang Sh, Back J, Rhode K, Liu H. Design and Integration of a Parallel, Soft Robotic End-Effector for Extracorporeal Ultrasound. IEEE Trans. Biomed. Eng 2020;67(8):2215–2229.
16. Kaminski JT, Rafatzand K, Zhang H. Feasibility of robot-assisted ultrasound imaging with force feedback for assessment of thyroid diseases. Medical Imaging 2020: Image-Guided Procedures, Robotic Interventions, and Modeling. ed. Fei B, Linte CA. Houston, United States: SPIE 2020:48.
17. Obaid M, Zhang Q, Adams SJ, Fotouhi R, Obaid H. Development and assessment of a telesonography system for musculoskeletal imaging. Eur Radiol Exp 2021;5(1):29.
18. Akbari M, Carriere J, Meyer T, Sloboda R, Husain S, Usmani N, et al. Robotic Ultrasound Scanning With Real-Time Image-Based Force Adjustment: Quick Response for Enabling Physical Distancing During the COVID-19 Pandemic. Front Robot Al 2021(8):645424.
19. Wang J, Peng Ch, Zhao Y, Ye R, Hong J, Huang H, Chen L. Application of a Robotic Tele-Echography System for COVID-19 Pneumonia. J Ultrasound Med 2021;40(2):385–390.
20. MGIUS-R3 [Electronic resource]. URL: https://en.mgi-tech.com/products/instruments_info/11/ (accessed: 14.07.2022).
21. Wu S, Wu D, Ye R, Li K, Lu Y, Xu J, Xiong L. Pilot Study of Robot-Assisted Teleultrasound Based on 5G Network: A New Feasible Strategy for Early Imaging Assessment During COVID-19 Pandemic. IEEE Trans Ultrason Ferroelectr Freq Control 2020;67(11):2241–2248.
22. Tsumura R, Hardin JW, Bimbraw K, Grossestreuer AV, Odusanya OS, Zheng Y, et al. Tele-Operative Low-Cost Robotic Lung Ultrasound Scanning Platform for Triage of COVID-19 Patients. IEEE Robot. Autom. Lett 2021;6(3):4664–4671.
23. Huang Q, Lan J, Li X. Robotic Arm Based Automatic Ultrasound Scanning for Three-Dimensional Imaging. IEEE Trans. Ind. Inf 2019;15(2):1173–1182.
24. Holmes HL, Stiller AA, Moore ChJ, Gregory AV, Roos CM, Miller JD, Gesser RC, et al. Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys. JoVE 2021(174):62682.
25. Bao X, Wang S, Housden R, Hajnal J, Rhode K. A Constant-Force End-Effector With Online Force Adjustment for Robotic Ultrasonography. IEEE Robot Autom Lett 2021;6(2):2547–2554.
26. Chen S, Li Zh, Lin Y, Wang F, Cao Q. Automatic ultrasound scanning robotic system with optical waveguide-based force measurement. Int J CARS 2021;16(6):1015–1025.
27. Ning G, Zhang X, Liao H. Autonomic Robotic Ultrasound Imaging System Based on Reinforcement Learning. IEEE Trans Biomed Eng 2021;68(9):2787–2797.
28. Wang K-J, Chen Ch-H, Chen J-JJ, Ciou W-S, Xu Ch-B, Du Yi-Ch. An Improved Sensing Method of a Robotic Ultrasound System for Real-Time Force and Angle Calibration. Sensors 2021;21(9):2927.
29. Virga S, Gobl R, Baust M, Navab N, Hennersperger Ch. Use the force: deformation correction in robotic 3D ultrasound. Int J CARS 2018;13(5):619–627.
30. Ipsen S, Wulff D, Kuhlemann I, Schweikard A, Ernst F. Towards automated ultrasound imaging—robotic image acquisition in liver and prostate for longterm motion monitoring. Phys. Med. Biol 2021;66(9):094002.
31. Fotouhi R, Semnani AN, Zhang QW, Adams SJ, Obaid H. A toolkit for haptic force feedback in a telerobotic ultrasound system. BMC Res Notes 2021;14(1):393.
32. Quanser Haptic 5-DOF Wand Blocks [Electronic resource]. URL: https://docs.quanser.com/quarc/documentation/quanser_5dof_wand_blocks.ht ml (accessed: 18.06.2022).
33. Wang J. 3D-printing based Transducer Holder for Robotic Assisted Ultrasound Guided HIFU. Procedia Manufacturing 2019(30):3-10.
34. Schlџter M, Fџrweger C, Schlaefer A. Optimizing robot motion for robotic ultrasound-guided radiation therapy. Phys Med Biol 2019;64(19):195012.
35. Gerlach S, Kuhlemann I, Ernst F, Fџrweger Ch, Schlaefer A. Impact of robotic ultrasound image guidance on plan quality in SBRT of the prostate. BJR 2017;90(1078):20160926.
36. Marsh-Feiley G, Eadie L, Wilson P. Telesonography in emergency medicine: A systematic review. PLoS ONE. ed. Schlachetzki F 2018;13(5):e0194840.
37. Nicosia L, Ferrari F, Bozzini AC, Latronico A, Trentin Ch, Meneghetti L, Pesapane F, et al. Automatic breast ultrasound: state of the art and future perspectives. Ecancer 2020;14.
38. Ianniello S, Conte P, Serafino MD, Miele V, Trinci M, Vallone G, Galluzzo M. Diagnostic accuracy of pubic symphysis ultrasound in the detection of unstable pelvis in polytrauma patients during e-FAST: the value of FAST–PLUS protocol. A preliminary experience. J Ultrasound 2021;24(4):423–428.
39. Arroyo J, Marini TJ, Saavedra AC, Toscano M, Baran TM, Drennan K, Dozier A, et al. No sonographer, no radiologist: New system for automatic prenatal detection of fetal biometry, fetal presentation, and placental location. PLoS ONE. ed. Papadopoulou V 2022;17(2):e0262107.
40. Marini TJ, Oppenheimer DC, Baran TM, Rubens DJ, Toscano M, Drennan K, et al. New Ultrasound Telediagnostic System for LOW-RESOURCE Areas: Pilot Results From Peru. J Ultrasound Med 2021;40(3):583–595.
